多体非弹性接触的虚元框架
IF 9.4
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2025-09-27
DOI:10.1016/j.ijmecsci.2025.110886
引用次数: 0
摘要
虚拟单元法(VEM)是最近发展起来的一种适用于任意单元形状的技术,它通过自适应节点插入将非保形网格转换为节点对节点的约束执行。尽管具有这些优势,但包括VEM方法在内的计算接触力学仍然面临着重大挑战,特别是在处理任意几何形状、有限变形、材料非线性和摩擦时。在本研究中,我们开发了一个由符号距离函数(SDF)辅助的VEM框架,该框架为间隙测量提供了有效的几何表示,并便于自适应节点插入。利用自动微分,我们进一步扩展了该方法,以处理在基于能量的框架内涉及弹塑性有限变形的接触。使用刚度矩阵的有限差分近似有效地计算了包括法向和摩擦效应在内的接触贡献。通过包括赫兹接触问题在内的综合数值基准,我们验证了该方法在小变形和有限变形、有塑性和无塑性情况下的准确性。此外,我们还证明了该方法在多体接触场景和深拉深过程仿真中的有效性。结果表明,基于sdf的VEM框架是解决具有挑战性的接触问题的可靠且通用的工具。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A virtual element framework for inelastic contact involving multiple bodies
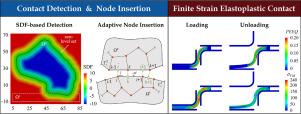
The Virtual Element Method (VEM) is a recently developed technique well-suited for arbitrary cell shapes, converting non-conformal meshes into node-to-node constraint enforcement through adaptive node insertion. Despite this advantage, computational contact mechanics including VEM approaches still presents significant challenges, particularly when dealing with arbitrary geometries, finite deformations, material non-linearity, and friction. In this study, we develop a VEM framework aided by the signed distance function (SDF), which provides an efficient geometric representation for gap measurements and facilitates adaptive node insertion. Leveraging automatic differentiation, we further extend the method to handle contacts involving elasto-plastic finite deformation within an energy-based framework. The contact contribution including both normal and frictional effects, is efficiently computed using a finite difference approximation of the stiffness matrix. Through comprehensive numerical benchmarks including Hertzian contact problems, we validate the accuracy of the proposed approach under small and finite deformations, with and without plasticity. Additionally, we demonstrate the method’s effectiveness in multi-body contact scenarios and a deep drawing process simulation. The results indicate that the SDF-based VEM framework is a reliable and versatile tool for solving challenging contact problems.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


