基于激光雷达的货舱散装煤实时抽取方法
IF 5.5
2区 工程技术
Q1 ENGINEERING, CIVIL
引用次数: 0
摘要
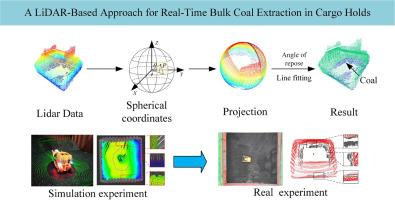
货舱中准确的散煤抽取是确保自动清洗系统运行安全和效率的关键。本文提出了一种基于激光雷达的货舱煤炭特征实时识别方法。首先,提出了一种自适应机制来过滤冗余点云数据,并根据货舱尺寸动态调整。其次,提出了一种基于货舱结构特点的角度预测方法,保证了船首航向的精确估计。随后进行点云配准,确定机器人姿态,生成全面的全局点云数据。最后,将配准的数据投影到球坐标中,实现基于休止角的煤点云识别。该方法实现了10hz的数据处理速率。在包括独山港在内的模拟和现实环境中进行的实验验证表明,该方法能够准确高效地提取煤炭,有效解决煤炭表面不均匀带来的挑战。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A LiDAR-based approach for real-time bulk coal extraction in cargo holds
Accurate bulk coal extraction in cargo holds is crucial for ensuring the operational safety and efficiency of automated cleaning systems. This paper presents a LiDAR-based approach tailored for real-time coal feature identification in cargo holds. First, a self-adaptive mechanism is proposed to filter redundant point cloud data, dynamically adjusting to the dimensions of the cargo hold. Next, an angle prediction method is developed based on the structural characteristics of the cargo hold, ensuring precise heading estimation. Subsequently, point cloud registration is performed to determine the robot’s pose and generate comprehensive global point cloud data. Finally, the registered data are projected into spherical coordinates, enabling the identification of coal point clouds based on their angle of repose. The proposed method achieves a data processing rate of 10 Hz. Experimental validation carried out in both simulated and real-world environments, including Dushan Port, demonstrates the capability of the method for accurate and efficient coal extraction, effectively addressing the challenges posed by uneven coal surfaces.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Ocean Engineering
工程技术-工程:大洋
CiteScore
7.30
自引率
34.00%
发文量
2379
审稿时长
8.1 months
期刊介绍:
Ocean Engineering provides a medium for the publication of original research and development work in the field of ocean engineering. Ocean Engineering seeks papers in the following topics.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


