基于创新注意力的卡尔曼网络集成鲁棒目标跟踪
IF 15.5
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
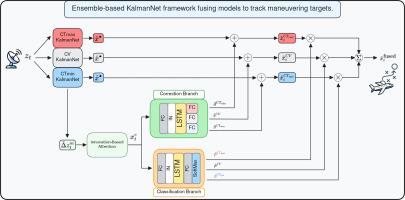
基于模型的跟踪算法在跟踪机动目标时,由于目标动力学的固有不确定性,往往会导致性能显著下降。为了解决这一限制,我们提出了一种新的基于集成的方法,该方法在多模型框架内集成了多个神经辅助卡尔曼滤波器,称为KalmanNet,灵感来自传统的交互多模型(IMM)滤波技术。每个KalmanNet实例都专门用于跟踪由不同运动模型控制的目标。该集成使用循环神经网络(RNN)融合它们的状态估计,该网络学习自适应地权衡和组合基于潜在目标动态的预测。通过大量的仿真实验证明,这种融合机制使系统能够更有效地模拟复杂的运动模式,并且在跟踪机动目标时,与依赖单个KalmanNet相比,实现更低的估计偏差和方差。此外,受传统的基于模型的跟踪算法的启发,我们引入了一种可解释的、基于创新的注意力机制,以增强我们结果的可解释性,这有助于识别目标运动动力学。我们的研究结果表明,这种注意机制提高了对传感器噪声、分布外数据和缺失测量的鲁棒性。总的来说,这种创新的方法有可能推进最先进的目标跟踪应用。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Ensemble of KalmanNets with innovation-based attention for robust target tracking
Model-based tracking algorithms often suffer from significant performance degradation when tracking maneuvering targets, primarily due to inherent uncertainties in target dynamics. To address this limitation, we propose a novel ensemble-based approach that integrates multiple neural-aided Kalman filters, referred to as KalmanNet, within a multiple-model framework, inspired by traditional interacting multiple-model (IMM) filtering techniques. Each KalmanNet instance is specialized in tracking targets governed by a distinct motion model. The ensemble fuses their state estimates using a Recurrent Neural Network (RNN), which learns to adaptively weigh and combine the predictions based on the underlying target dynamics. This fusion mechanism enables the system to model complex motion patterns more effectively and achieves lower estimation bias and variance compared to relying on a single KalmanNet when tracking maneuvering targets, as demonstrated through extensive simulation experiments. Furthermore, we introduce an explainable, innovation-based attention mechanism to enhance the interpretability of our results, inspired by traditional model-based tracking algorithms, that aids the identification of target motion dynamics. Our findings indicate that this attention mechanism improves robustness to sensor noise, out-of-distribution data, and missing measurements. Overall, this innovative approach has the potential to advance state-of-the-art target tracking applications.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Information Fusion
工程技术-计算机:理论方法
CiteScore
33.20
自引率
4.30%
发文量
161
审稿时长
7.9 months
期刊介绍:
Information Fusion serves as a central platform for showcasing advancements in multi-sensor, multi-source, multi-process information fusion, fostering collaboration among diverse disciplines driving its progress. It is the leading outlet for sharing research and development in this field, focusing on architectures, algorithms, and applications. Papers dealing with fundamental theoretical analyses as well as those demonstrating their application to real-world problems will be welcome.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


