Liling Hou, Fei Yu, Yaowen Hu, Yang Hu, Ruoli Yang
{"title":"RSA-TransUNet:用于增强道路裂缝分割的鲁棒结构自适应TransUNet。","authors":"Liling Hou, Fei Yu, Yaowen Hu, Yang Hu, Ruoli Yang","doi":"10.3389/fnbot.2025.1633697","DOIUrl":null,"url":null,"abstract":"<p><p>With the advancement of deep learning, road crack segmentation has become increasingly crucial for intelligent transportation safety. Despite notable progress, existing methods still face challenges in capturing fine-grained textures in small crack regions, handling blurred edges and significant width variations, and performing multi-class segmentation. Moreover, the high computational cost of training such models hinders their practical deployment. To tackle these limitations, we propose RSA-TransUNet, a novel model for road crack segmentation. At its core is the Axial-shift MLP Attention (ASMA) mechanism, which integrates axial perception with sparse contextual modeling. Through multi-path axial perturbations and an attention-guided structure, ASMA effectively captures long-range dependencies within row-column patterns, enabling detailed modeling of multi-scale crack features. To improve the model's adaptability to structural irregularities, we introduce the Adaptive Spline Linear Unit (ASLU), which enhances the model's capacity to represent nonlinear transformations. ASLU improves responsiveness to microstructural variations, morphological distortions, and local discontinuities, thereby boosting robustness across different domains. We further develop a Structure-aware Multi-stage Evolutionary Optimization (SMEO) strategy, which guides the training process through three phases: structural perception exploration, feature stability enhancement, and global perturbation. This strategy combines breadth sampling, convergence compression, and local escape mechanisms to improve convergence speed, global search efficiency, and generalization performance. Extensive evaluations on the Crack500, CFD, and DeepCrack datasets-including ablation studies and comparative experiments-demonstrate that RSA-TransUNet achieves superior segmentation accuracy and robustness in complex road environments, highlighting its potential for real-world applications.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1633697"},"PeriodicalIF":2.8000,"publicationDate":"2025-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12479514/pdf/","citationCount":"0","resultStr":"{\"title\":\"RSA-TransUNet: a robust structure-adaptive TransUNet for enhanced road crack segmentation.\",\"authors\":\"Liling Hou, Fei Yu, Yaowen Hu, Yang Hu, Ruoli Yang\",\"doi\":\"10.3389/fnbot.2025.1633697\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>With the advancement of deep learning, road crack segmentation has become increasingly crucial for intelligent transportation safety. Despite notable progress, existing methods still face challenges in capturing fine-grained textures in small crack regions, handling blurred edges and significant width variations, and performing multi-class segmentation. Moreover, the high computational cost of training such models hinders their practical deployment. To tackle these limitations, we propose RSA-TransUNet, a novel model for road crack segmentation. At its core is the Axial-shift MLP Attention (ASMA) mechanism, which integrates axial perception with sparse contextual modeling. Through multi-path axial perturbations and an attention-guided structure, ASMA effectively captures long-range dependencies within row-column patterns, enabling detailed modeling of multi-scale crack features. To improve the model's adaptability to structural irregularities, we introduce the Adaptive Spline Linear Unit (ASLU), which enhances the model's capacity to represent nonlinear transformations. ASLU improves responsiveness to microstructural variations, morphological distortions, and local discontinuities, thereby boosting robustness across different domains. We further develop a Structure-aware Multi-stage Evolutionary Optimization (SMEO) strategy, which guides the training process through three phases: structural perception exploration, feature stability enhancement, and global perturbation. This strategy combines breadth sampling, convergence compression, and local escape mechanisms to improve convergence speed, global search efficiency, and generalization performance. Extensive evaluations on the Crack500, CFD, and DeepCrack datasets-including ablation studies and comparative experiments-demonstrate that RSA-TransUNet achieves superior segmentation accuracy and robustness in complex road environments, highlighting its potential for real-world applications.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1633697\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-09-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12479514/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1633697\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1633697","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
RSA-TransUNet: a robust structure-adaptive TransUNet for enhanced road crack segmentation.
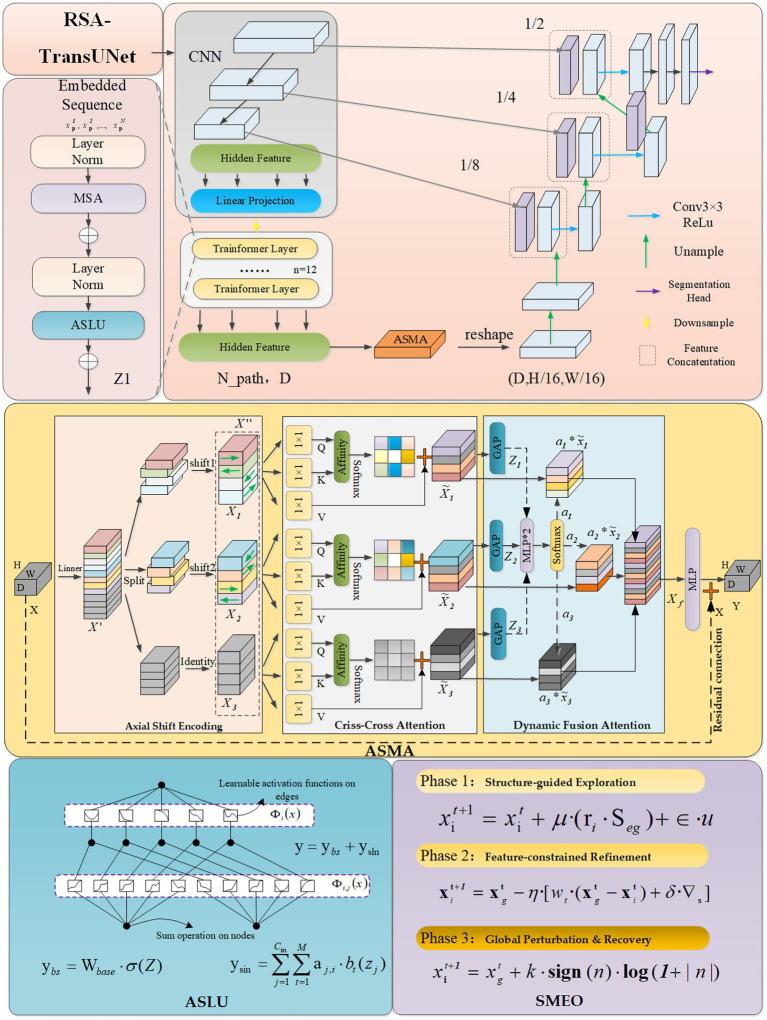
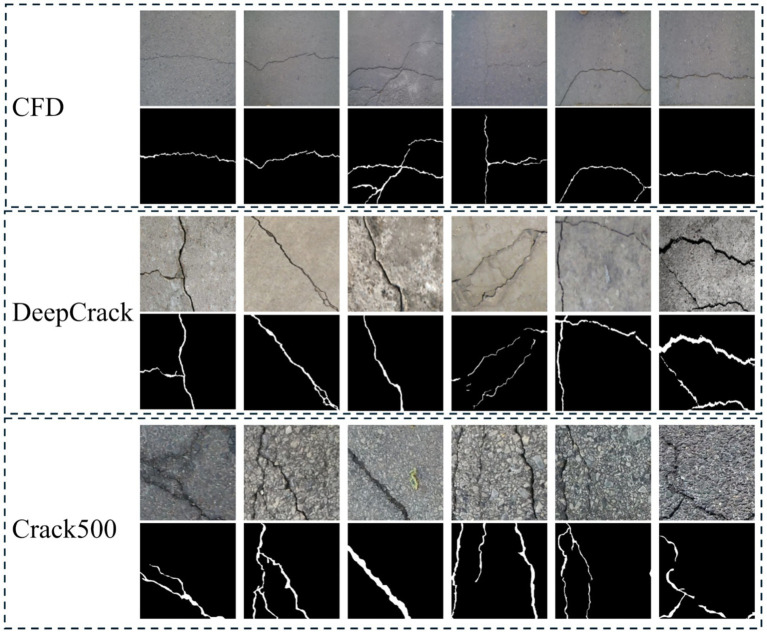
With the advancement of deep learning, road crack segmentation has become increasingly crucial for intelligent transportation safety. Despite notable progress, existing methods still face challenges in capturing fine-grained textures in small crack regions, handling blurred edges and significant width variations, and performing multi-class segmentation. Moreover, the high computational cost of training such models hinders their practical deployment. To tackle these limitations, we propose RSA-TransUNet, a novel model for road crack segmentation. At its core is the Axial-shift MLP Attention (ASMA) mechanism, which integrates axial perception with sparse contextual modeling. Through multi-path axial perturbations and an attention-guided structure, ASMA effectively captures long-range dependencies within row-column patterns, enabling detailed modeling of multi-scale crack features. To improve the model's adaptability to structural irregularities, we introduce the Adaptive Spline Linear Unit (ASLU), which enhances the model's capacity to represent nonlinear transformations. ASLU improves responsiveness to microstructural variations, morphological distortions, and local discontinuities, thereby boosting robustness across different domains. We further develop a Structure-aware Multi-stage Evolutionary Optimization (SMEO) strategy, which guides the training process through three phases: structural perception exploration, feature stability enhancement, and global perturbation. This strategy combines breadth sampling, convergence compression, and local escape mechanisms to improve convergence speed, global search efficiency, and generalization performance. Extensive evaluations on the Crack500, CFD, and DeepCrack datasets-including ablation studies and comparative experiments-demonstrate that RSA-TransUNet achieves superior segmentation accuracy and robustness in complex road environments, highlighting its potential for real-world applications.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


