{"title":"基于运动预测的新型实时辅助臀部可穿戴外骨骼机器人用于亚急性中风下肢康复:一项单盲、随机对照试验。","authors":"Yongjie Li, Shuwen Luo, Runxin Luo, Hongju Liu","doi":"10.1186/s12883-025-04437-5","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>A novel real-time assistive hip-wearable exoskeleton robot is developed based on motion prediction for stroke patients, however its rehabilitation efficacy is not yet clear.This study aimed to explore the effect of this robot on lower extremity rehabilitation in subacute stroke patients, focusing on gait function, with lower limb motor impairment, and balance being considered secondary outcomes.</p><p><strong>Methods: </strong>The investigation enrolled 40 subacute stroke patients, randomly assigned to two groups: the robot-assisted gait training(RAGT) group and a control group.The control group underwent conventional rehabilitation and therapist-assisted gait training, while the RAGT group received conventional therapy supplemented with robot-assisted training. Each group participated in the intervention five days a week for four weeks.The primary outcomes comprised gait kinematics(hip-knee-ankle angles), kinetics[peak vertical ground reaction force(vGRF)], and spatiotemporal parameters. Asymmetry in gait kinematic and kinetic variables was calculated using the asymmetry index(ASI). Secondary outcomes included the Fugl-Meyer Assessment for Lower Extremity Scale(FMA-LE), the Berg Balance Scale(BBS), and the Timed Up and Go Test(TUGT). All measures were evaluated at baseline and at four weeks post-intervention.</p><p><strong>Results: </strong>With respect to primary outcomes, the RAGT group exhibited marked improvements in gait speed, cadence, peak hip flexion/extension and knee flexion in both limbs, and in peak vGRF on the paretic side pre- and post-intervention. Post-intervention between-group comparisons revealed that the RAGT group achieved higher gait speed, cadence, step length, peak hip flexion/extension and peak knee flexion in both lower limbs, and peak vGRF on the paretic side than the control group(P<0.05). Additionally, the RAGT group exhibited significantly lower ASI values for peak hip flexion/extension, peak knee flexion, and peak vGRF post-intervention compared to controls(P<0.05). Regarding secondary outcomes, both groups showed significant improvements in FMA-LE and BBS scores from pre- to post-intervention(P<0.05).Furthermore, post-intervention analyses indicated that the RAGT group outperformed the control group on the FMA-LE, BBS, and TUGT measures (P<0.05).</p><p><strong>Conclusion: </strong>The novel real-time assistive hip-wearable exoskeleton robot based on motion prediction is effective for improving gait function, lower limb motor impairment and balance ability in subacute stroke patients.</p><p><strong>Trial registration: </strong>www.chictr.org.cn (registrationnumber: ChiCTR2300074562). Registration date: 09/08/2023.</p>","PeriodicalId":9170,"journal":{"name":"BMC Neurology","volume":"25 1","pages":"399"},"PeriodicalIF":2.2000,"publicationDate":"2025-09-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12482354/pdf/","citationCount":"0","resultStr":"{\"title\":\"A novel real-time assistive hip-wearable exoskeleton robot based on motion prediction for lower extremity rehabilitation in subacute stroke: a single-blinded, randomized controlled trial.\",\"authors\":\"Yongjie Li, Shuwen Luo, Runxin Luo, Hongju Liu\",\"doi\":\"10.1186/s12883-025-04437-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>A novel real-time assistive hip-wearable exoskeleton robot is developed based on motion prediction for stroke patients, however its rehabilitation efficacy is not yet clear.This study aimed to explore the effect of this robot on lower extremity rehabilitation in subacute stroke patients, focusing on gait function, with lower limb motor impairment, and balance being considered secondary outcomes.</p><p><strong>Methods: </strong>The investigation enrolled 40 subacute stroke patients, randomly assigned to two groups: the robot-assisted gait training(RAGT) group and a control group.The control group underwent conventional rehabilitation and therapist-assisted gait training, while the RAGT group received conventional therapy supplemented with robot-assisted training. Each group participated in the intervention five days a week for four weeks.The primary outcomes comprised gait kinematics(hip-knee-ankle angles), kinetics[peak vertical ground reaction force(vGRF)], and spatiotemporal parameters. Asymmetry in gait kinematic and kinetic variables was calculated using the asymmetry index(ASI). Secondary outcomes included the Fugl-Meyer Assessment for Lower Extremity Scale(FMA-LE), the Berg Balance Scale(BBS), and the Timed Up and Go Test(TUGT). All measures were evaluated at baseline and at four weeks post-intervention.</p><p><strong>Results: </strong>With respect to primary outcomes, the RAGT group exhibited marked improvements in gait speed, cadence, peak hip flexion/extension and knee flexion in both limbs, and in peak vGRF on the paretic side pre- and post-intervention. Post-intervention between-group comparisons revealed that the RAGT group achieved higher gait speed, cadence, step length, peak hip flexion/extension and peak knee flexion in both lower limbs, and peak vGRF on the paretic side than the control group(P<0.05). Additionally, the RAGT group exhibited significantly lower ASI values for peak hip flexion/extension, peak knee flexion, and peak vGRF post-intervention compared to controls(P<0.05). Regarding secondary outcomes, both groups showed significant improvements in FMA-LE and BBS scores from pre- to post-intervention(P<0.05).Furthermore, post-intervention analyses indicated that the RAGT group outperformed the control group on the FMA-LE, BBS, and TUGT measures (P<0.05).</p><p><strong>Conclusion: </strong>The novel real-time assistive hip-wearable exoskeleton robot based on motion prediction is effective for improving gait function, lower limb motor impairment and balance ability in subacute stroke patients.</p><p><strong>Trial registration: </strong>www.chictr.org.cn (registrationnumber: ChiCTR2300074562). Registration date: 09/08/2023.</p>\",\"PeriodicalId\":9170,\"journal\":{\"name\":\"BMC Neurology\",\"volume\":\"25 1\",\"pages\":\"399\"},\"PeriodicalIF\":2.2000,\"publicationDate\":\"2025-09-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12482354/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"BMC Neurology\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1186/s12883-025-04437-5\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"CLINICAL NEUROLOGY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"BMC Neurology","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1186/s12883-025-04437-5","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"CLINICAL NEUROLOGY","Score":null,"Total":0}
A novel real-time assistive hip-wearable exoskeleton robot based on motion prediction for lower extremity rehabilitation in subacute stroke: a single-blinded, randomized controlled trial.
Background: A novel real-time assistive hip-wearable exoskeleton robot is developed based on motion prediction for stroke patients, however its rehabilitation efficacy is not yet clear.This study aimed to explore the effect of this robot on lower extremity rehabilitation in subacute stroke patients, focusing on gait function, with lower limb motor impairment, and balance being considered secondary outcomes.
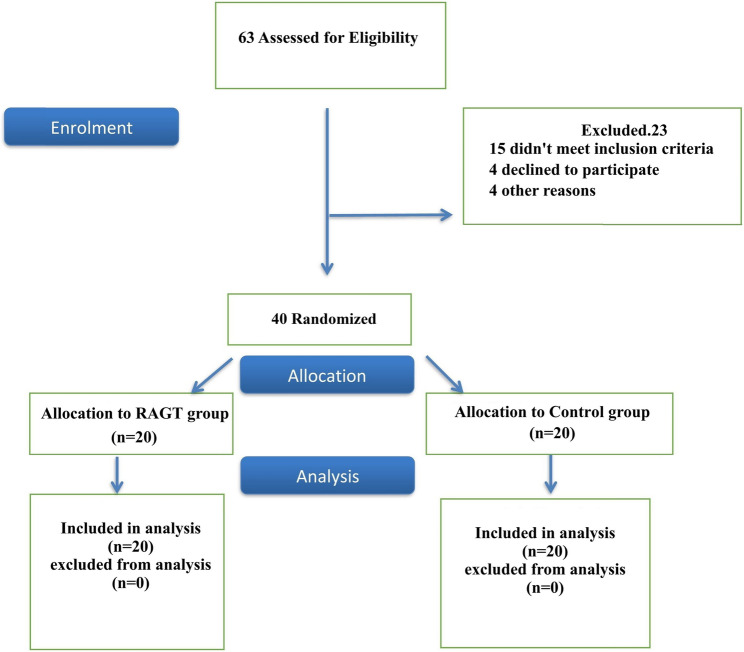
Methods: The investigation enrolled 40 subacute stroke patients, randomly assigned to two groups: the robot-assisted gait training(RAGT) group and a control group.The control group underwent conventional rehabilitation and therapist-assisted gait training, while the RAGT group received conventional therapy supplemented with robot-assisted training. Each group participated in the intervention five days a week for four weeks.The primary outcomes comprised gait kinematics(hip-knee-ankle angles), kinetics[peak vertical ground reaction force(vGRF)], and spatiotemporal parameters. Asymmetry in gait kinematic and kinetic variables was calculated using the asymmetry index(ASI). Secondary outcomes included the Fugl-Meyer Assessment for Lower Extremity Scale(FMA-LE), the Berg Balance Scale(BBS), and the Timed Up and Go Test(TUGT). All measures were evaluated at baseline and at four weeks post-intervention.
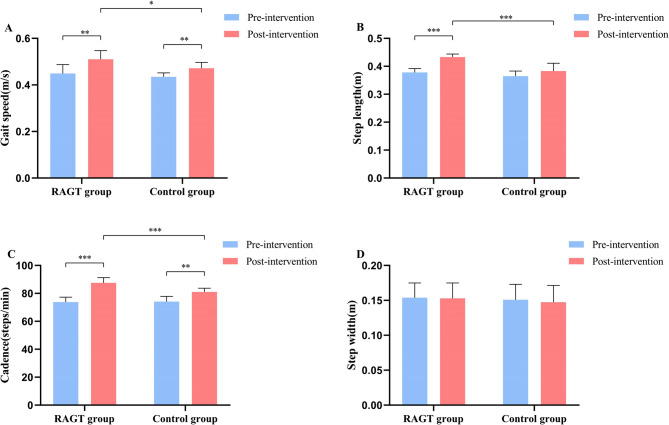
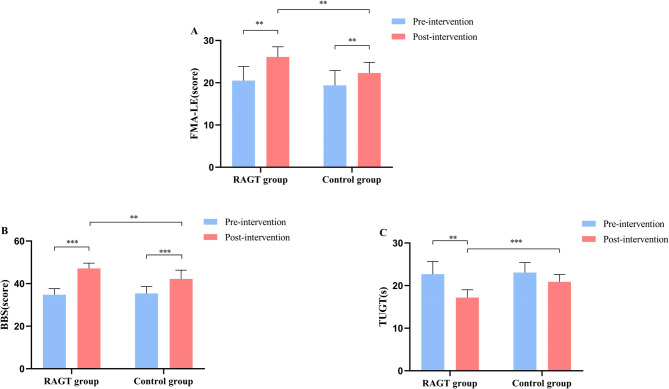
Results: With respect to primary outcomes, the RAGT group exhibited marked improvements in gait speed, cadence, peak hip flexion/extension and knee flexion in both limbs, and in peak vGRF on the paretic side pre- and post-intervention. Post-intervention between-group comparisons revealed that the RAGT group achieved higher gait speed, cadence, step length, peak hip flexion/extension and peak knee flexion in both lower limbs, and peak vGRF on the paretic side than the control group(P<0.05). Additionally, the RAGT group exhibited significantly lower ASI values for peak hip flexion/extension, peak knee flexion, and peak vGRF post-intervention compared to controls(P<0.05). Regarding secondary outcomes, both groups showed significant improvements in FMA-LE and BBS scores from pre- to post-intervention(P<0.05).Furthermore, post-intervention analyses indicated that the RAGT group outperformed the control group on the FMA-LE, BBS, and TUGT measures (P<0.05).
Conclusion: The novel real-time assistive hip-wearable exoskeleton robot based on motion prediction is effective for improving gait function, lower limb motor impairment and balance ability in subacute stroke patients.
期刊介绍:
BMC Neurology is an open access, peer-reviewed journal that considers articles on all aspects of the prevention, diagnosis and management of neurological disorders, as well as related molecular genetics, pathophysiology, and epidemiology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


