{"title":"基于加速度计和DTW的激光雷达安全包络检测在过山车入侵定位中的应用。","authors":"Huajie Wang, Zhao Zhao, Yifeng Sun, Weikei Song","doi":"10.3390/mi16091062","DOIUrl":null,"url":null,"abstract":"<p><p>Autonomous vehicles, submersible robotic systems and drones, and other human-carrying equipment consistently adhere to a safety perimeter, ensuring collision-free navigation amidst surrounding objects. In contrast, roller coaster vehicles, despite being constrained to a predetermined track, necessitate frequent safety distance detection owing to the variability introduced by trees and decorative installations. Passengers' limbs may protrude beyond vehicle boundaries, posing a collision hazard. The motion range of limbs, influenced by vehicle-specific conditions, mismatches standardized safety volumes (cylindrical, cubic, and rectangular) designed for mobile entities. The roller coaster industry's current practice involves a moving safety frame, which visually inspects for collisions to assess safety distances, which is cumbersome and prone to oversight in intricate settings. Therefore, this study introduces a novel safety envelope detector (SE-detector). It creates a customer-defined virtual safety envelope around the roller coaster vehicle and measures the safety distance based on LiDAR (Light Detection and Ranging) to detect the intrusions of obstacles. Meanwhile, this SE-detector also innovatively integrated an accelerometer to synchronously measure the acceleration of the vehicle. The measured acceleration will be aligned with simulated sequences by dynamic time warping (DTW) algorithms to pinpoint intrusion location. Additionally, a wide-angle camera is also deployed to enhance perception of the surrounding environment. The SE-detector developed in this study has the capability to record inspection results. It is expected to enhance the inspection capabilities of the safety envelope for roller coasters, thereby improving the efficiency of safety distance inspection.</p>","PeriodicalId":18508,"journal":{"name":"Micromachines","volume":"16 9","pages":""},"PeriodicalIF":3.0000,"publicationDate":"2025-09-19","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12471903/pdf/","citationCount":"0","resultStr":"{\"title\":\"LiDAR-Based Safety Envelope Detection with Accelerometer and DTW for Intrusion Localization in Roller Coasters.\",\"authors\":\"Huajie Wang, Zhao Zhao, Yifeng Sun, Weikei Song\",\"doi\":\"10.3390/mi16091062\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Autonomous vehicles, submersible robotic systems and drones, and other human-carrying equipment consistently adhere to a safety perimeter, ensuring collision-free navigation amidst surrounding objects. In contrast, roller coaster vehicles, despite being constrained to a predetermined track, necessitate frequent safety distance detection owing to the variability introduced by trees and decorative installations. Passengers' limbs may protrude beyond vehicle boundaries, posing a collision hazard. The motion range of limbs, influenced by vehicle-specific conditions, mismatches standardized safety volumes (cylindrical, cubic, and rectangular) designed for mobile entities. The roller coaster industry's current practice involves a moving safety frame, which visually inspects for collisions to assess safety distances, which is cumbersome and prone to oversight in intricate settings. Therefore, this study introduces a novel safety envelope detector (SE-detector). It creates a customer-defined virtual safety envelope around the roller coaster vehicle and measures the safety distance based on LiDAR (Light Detection and Ranging) to detect the intrusions of obstacles. Meanwhile, this SE-detector also innovatively integrated an accelerometer to synchronously measure the acceleration of the vehicle. The measured acceleration will be aligned with simulated sequences by dynamic time warping (DTW) algorithms to pinpoint intrusion location. Additionally, a wide-angle camera is also deployed to enhance perception of the surrounding environment. The SE-detector developed in this study has the capability to record inspection results. It is expected to enhance the inspection capabilities of the safety envelope for roller coasters, thereby improving the efficiency of safety distance inspection.</p>\",\"PeriodicalId\":18508,\"journal\":{\"name\":\"Micromachines\",\"volume\":\"16 9\",\"pages\":\"\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-09-19\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12471903/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Micromachines\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/mi16091062\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"CHEMISTRY, ANALYTICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Micromachines","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/mi16091062","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"CHEMISTRY, ANALYTICAL","Score":null,"Total":0}
LiDAR-Based Safety Envelope Detection with Accelerometer and DTW for Intrusion Localization in Roller Coasters.
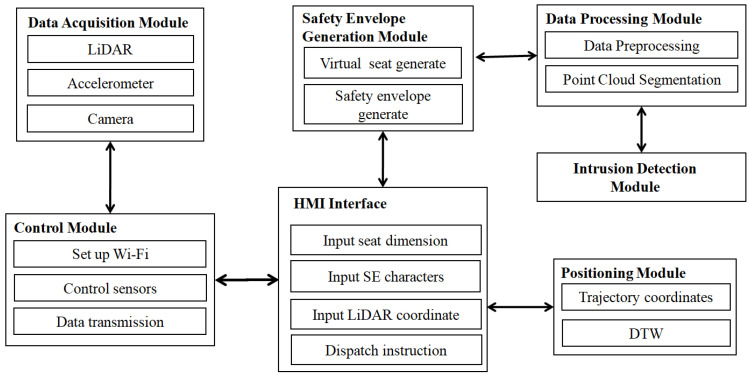
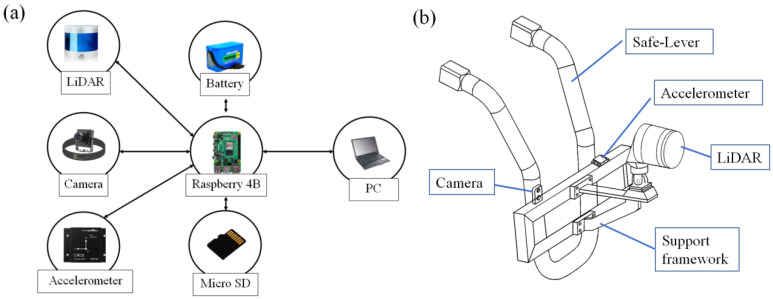
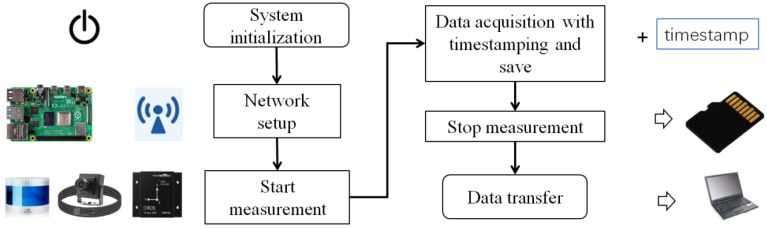
Autonomous vehicles, submersible robotic systems and drones, and other human-carrying equipment consistently adhere to a safety perimeter, ensuring collision-free navigation amidst surrounding objects. In contrast, roller coaster vehicles, despite being constrained to a predetermined track, necessitate frequent safety distance detection owing to the variability introduced by trees and decorative installations. Passengers' limbs may protrude beyond vehicle boundaries, posing a collision hazard. The motion range of limbs, influenced by vehicle-specific conditions, mismatches standardized safety volumes (cylindrical, cubic, and rectangular) designed for mobile entities. The roller coaster industry's current practice involves a moving safety frame, which visually inspects for collisions to assess safety distances, which is cumbersome and prone to oversight in intricate settings. Therefore, this study introduces a novel safety envelope detector (SE-detector). It creates a customer-defined virtual safety envelope around the roller coaster vehicle and measures the safety distance based on LiDAR (Light Detection and Ranging) to detect the intrusions of obstacles. Meanwhile, this SE-detector also innovatively integrated an accelerometer to synchronously measure the acceleration of the vehicle. The measured acceleration will be aligned with simulated sequences by dynamic time warping (DTW) algorithms to pinpoint intrusion location. Additionally, a wide-angle camera is also deployed to enhance perception of the surrounding environment. The SE-detector developed in this study has the capability to record inspection results. It is expected to enhance the inspection capabilities of the safety envelope for roller coasters, thereby improving the efficiency of safety distance inspection.
期刊介绍:
Micromachines (ISSN 2072-666X) is an international, peer-reviewed open access journal which provides an advanced forum for studies related to micro-scaled machines and micromachinery. It publishes reviews, regular research papers and short communications. Our aim is to encourage scientists to publish their experimental and theoretical results in as much detail as possible. There is no restriction on the length of the papers. The full experimental details must be provided so that the results can be reproduced.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


