{"title":"基于改进灰色预测模型的GNSS/MEMS IMU阵列融合定位方法研究。","authors":"Yihao Chen, Jieyu Liu, Weiwei Qin, Can Li","doi":"10.3390/mi16091040","DOIUrl":null,"url":null,"abstract":"<p><p>To address the issue of decreased positioning accuracy caused by interference or blockage of GNSS signals in vehicle navigation systems, this paper proposes a GNSS/MEMS IMU array fusion localization method based on an improved grey prediction model. First, a multi-feature fusion GNSS confidence evaluation algorithm is designed to assess the reliability of GNSS data in real time using indicators such as signal strength, satellite visibility, and solution consistency; second, to overcome the limitations of traditional grey prediction models in processing vehicle complex motion data, two key improvements are proposed: (1) a dynamic background value optimization method based on vehicle motion characteristics, which dynamically adjusts the weight coefficients in the background value construction according to vehicle speed, acceleration, and road curvature, enhancing the model's sensitivity to changes in vehicle motion state; (2) a residual sequence compensation mechanism, which analyzes the variation patterns of historical residual sequences to accurately correct the prediction results, significantly improving the model's prediction accuracy in nonlinear motion scenarios; finally, an adaptive fusion framework under normal and denied GNSS conditions is constructed, which directly fuses data when GNSS is reliable, and uses the improved grey model prediction results as virtual measurements for fusion during signal denial. Simulation and vehicle experiments verify that: compared to the traditional GM(1,1) model, the proposed method improves prediction accuracy by 31%, 52%, and 45% in straight, turning, and acceleration scenarios, respectively; in a 30-s GNSS denial scenario, the accuracy is improved by over 79% compared to pure INS methods.</p>","PeriodicalId":18508,"journal":{"name":"Micromachines","volume":"16 9","pages":""},"PeriodicalIF":3.0000,"publicationDate":"2025-09-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12471993/pdf/","citationCount":"0","resultStr":"{\"title\":\"Research on GNSS/MEMS IMU Array Fusion Localization Method Based on Improved Grey Prediction Model.\",\"authors\":\"Yihao Chen, Jieyu Liu, Weiwei Qin, Can Li\",\"doi\":\"10.3390/mi16091040\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>To address the issue of decreased positioning accuracy caused by interference or blockage of GNSS signals in vehicle navigation systems, this paper proposes a GNSS/MEMS IMU array fusion localization method based on an improved grey prediction model. First, a multi-feature fusion GNSS confidence evaluation algorithm is designed to assess the reliability of GNSS data in real time using indicators such as signal strength, satellite visibility, and solution consistency; second, to overcome the limitations of traditional grey prediction models in processing vehicle complex motion data, two key improvements are proposed: (1) a dynamic background value optimization method based on vehicle motion characteristics, which dynamically adjusts the weight coefficients in the background value construction according to vehicle speed, acceleration, and road curvature, enhancing the model's sensitivity to changes in vehicle motion state; (2) a residual sequence compensation mechanism, which analyzes the variation patterns of historical residual sequences to accurately correct the prediction results, significantly improving the model's prediction accuracy in nonlinear motion scenarios; finally, an adaptive fusion framework under normal and denied GNSS conditions is constructed, which directly fuses data when GNSS is reliable, and uses the improved grey model prediction results as virtual measurements for fusion during signal denial. Simulation and vehicle experiments verify that: compared to the traditional GM(1,1) model, the proposed method improves prediction accuracy by 31%, 52%, and 45% in straight, turning, and acceleration scenarios, respectively; in a 30-s GNSS denial scenario, the accuracy is improved by over 79% compared to pure INS methods.</p>\",\"PeriodicalId\":18508,\"journal\":{\"name\":\"Micromachines\",\"volume\":\"16 9\",\"pages\":\"\"},\"PeriodicalIF\":3.0000,\"publicationDate\":\"2025-09-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12471993/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Micromachines\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/mi16091040\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"CHEMISTRY, ANALYTICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Micromachines","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/mi16091040","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"CHEMISTRY, ANALYTICAL","Score":null,"Total":0}
Research on GNSS/MEMS IMU Array Fusion Localization Method Based on Improved Grey Prediction Model.
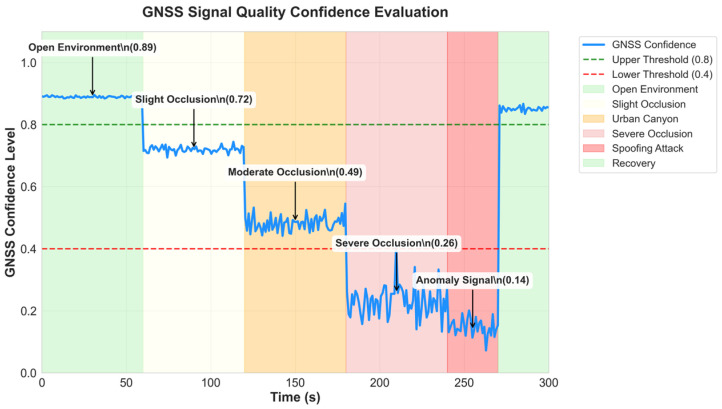
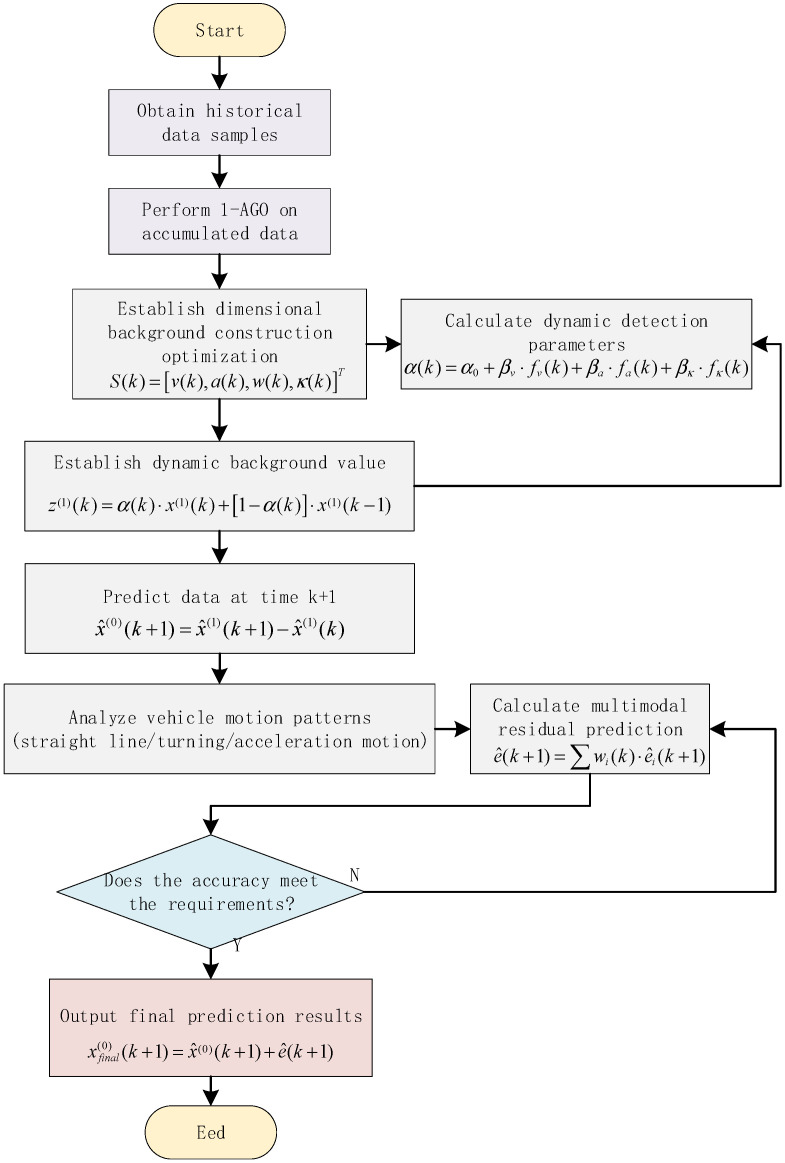
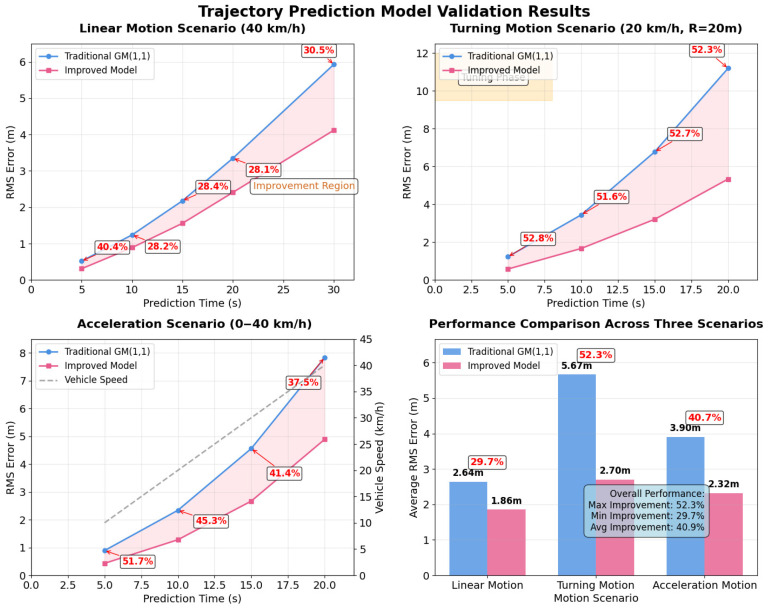
To address the issue of decreased positioning accuracy caused by interference or blockage of GNSS signals in vehicle navigation systems, this paper proposes a GNSS/MEMS IMU array fusion localization method based on an improved grey prediction model. First, a multi-feature fusion GNSS confidence evaluation algorithm is designed to assess the reliability of GNSS data in real time using indicators such as signal strength, satellite visibility, and solution consistency; second, to overcome the limitations of traditional grey prediction models in processing vehicle complex motion data, two key improvements are proposed: (1) a dynamic background value optimization method based on vehicle motion characteristics, which dynamically adjusts the weight coefficients in the background value construction according to vehicle speed, acceleration, and road curvature, enhancing the model's sensitivity to changes in vehicle motion state; (2) a residual sequence compensation mechanism, which analyzes the variation patterns of historical residual sequences to accurately correct the prediction results, significantly improving the model's prediction accuracy in nonlinear motion scenarios; finally, an adaptive fusion framework under normal and denied GNSS conditions is constructed, which directly fuses data when GNSS is reliable, and uses the improved grey model prediction results as virtual measurements for fusion during signal denial. Simulation and vehicle experiments verify that: compared to the traditional GM(1,1) model, the proposed method improves prediction accuracy by 31%, 52%, and 45% in straight, turning, and acceleration scenarios, respectively; in a 30-s GNSS denial scenario, the accuracy is improved by over 79% compared to pure INS methods.
期刊介绍:
Micromachines (ISSN 2072-666X) is an international, peer-reviewed open access journal which provides an advanced forum for studies related to micro-scaled machines and micromachinery. It publishes reviews, regular research papers and short communications. Our aim is to encourage scientists to publish their experimental and theoretical results in as much detail as possible. There is no restriction on the length of the papers. The full experimental details must be provided so that the results can be reproduced.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


