Erfan Shojaei Barjuei, Joonhwan Shin, Keekyoung Kim, Jihyun Lee
{"title":"高精度多轴机器人打印:复杂组织创建的优化工作流程。","authors":"Erfan Shojaei Barjuei, Joonhwan Shin, Keekyoung Kim, Jihyun Lee","doi":"10.3390/bioengineering12090949","DOIUrl":null,"url":null,"abstract":"<p><p>Three-dimensional bioprinting holds great promise for tissue engineering, but struggles with fabricating complex curved geometries such as vascular networks. Though precise, traditional Cartesian bioprinters are constrained by linear layer-by-layer deposition along fixed axes, resulting in limitations such as the stair-step effect. Multi-axis robotic bioprinting addresses these challenges by allowing dynamic nozzle orientation and motion along curvilinear paths, enabling conformal printing on anatomically relevant surfaces. Although robotic arms offer lower mechanical precision than CNC stages, accuracy can be enhanced through methods such as vision-based toolpath correction. This study presents a modular multi-axis robotic embedded bioprinting platform that integrates a six-degrees-of-freedom robotic arm, a pneumatic extrusion system, and a viscoplastic support bath. A streamlined workflow combines CAD modeling, CAM slicing, robotic simulation, and automated execution for efficient fabrication. Two case studies validate the system's ability to print freeform surfaces and vascular-inspired tubular constructs with high fidelity. The results highlight the platform's versatility and potential for complex tissue fabrication and future in situ bioprinting applications.</p>","PeriodicalId":8874,"journal":{"name":"Bioengineering","volume":"12 9","pages":""},"PeriodicalIF":3.7000,"publicationDate":"2025-08-31","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12466967/pdf/","citationCount":"0","resultStr":"{\"title\":\"High-Precision Multi-Axis Robotic Printing: Optimized Workflow for Complex Tissue Creation.\",\"authors\":\"Erfan Shojaei Barjuei, Joonhwan Shin, Keekyoung Kim, Jihyun Lee\",\"doi\":\"10.3390/bioengineering12090949\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Three-dimensional bioprinting holds great promise for tissue engineering, but struggles with fabricating complex curved geometries such as vascular networks. Though precise, traditional Cartesian bioprinters are constrained by linear layer-by-layer deposition along fixed axes, resulting in limitations such as the stair-step effect. Multi-axis robotic bioprinting addresses these challenges by allowing dynamic nozzle orientation and motion along curvilinear paths, enabling conformal printing on anatomically relevant surfaces. Although robotic arms offer lower mechanical precision than CNC stages, accuracy can be enhanced through methods such as vision-based toolpath correction. This study presents a modular multi-axis robotic embedded bioprinting platform that integrates a six-degrees-of-freedom robotic arm, a pneumatic extrusion system, and a viscoplastic support bath. A streamlined workflow combines CAD modeling, CAM slicing, robotic simulation, and automated execution for efficient fabrication. Two case studies validate the system's ability to print freeform surfaces and vascular-inspired tubular constructs with high fidelity. The results highlight the platform's versatility and potential for complex tissue fabrication and future in situ bioprinting applications.</p>\",\"PeriodicalId\":8874,\"journal\":{\"name\":\"Bioengineering\",\"volume\":\"12 9\",\"pages\":\"\"},\"PeriodicalIF\":3.7000,\"publicationDate\":\"2025-08-31\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12466967/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Bioengineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/bioengineering12090949\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, BIOMEDICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Bioengineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/bioengineering12090949","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
High-Precision Multi-Axis Robotic Printing: Optimized Workflow for Complex Tissue Creation.
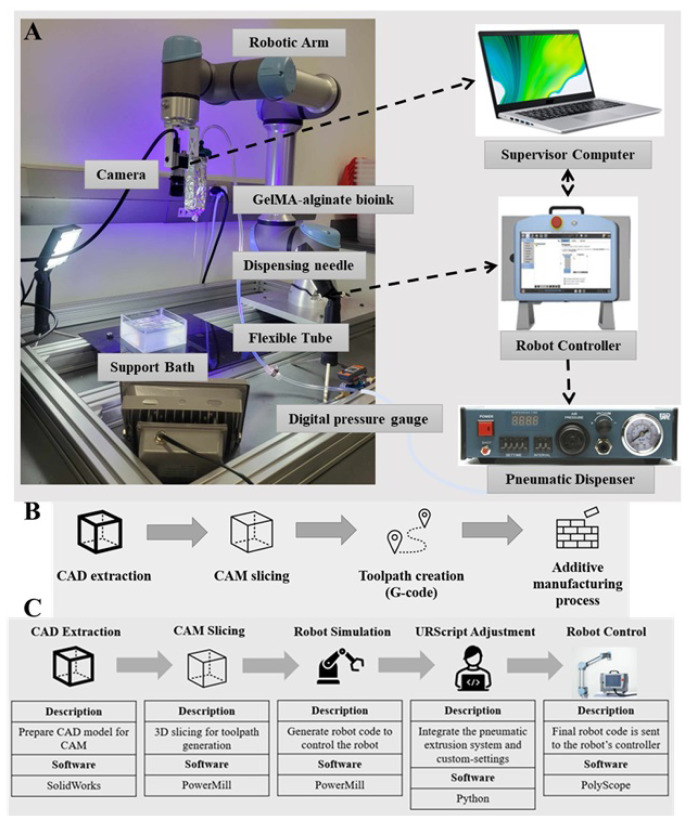
Three-dimensional bioprinting holds great promise for tissue engineering, but struggles with fabricating complex curved geometries such as vascular networks. Though precise, traditional Cartesian bioprinters are constrained by linear layer-by-layer deposition along fixed axes, resulting in limitations such as the stair-step effect. Multi-axis robotic bioprinting addresses these challenges by allowing dynamic nozzle orientation and motion along curvilinear paths, enabling conformal printing on anatomically relevant surfaces. Although robotic arms offer lower mechanical precision than CNC stages, accuracy can be enhanced through methods such as vision-based toolpath correction. This study presents a modular multi-axis robotic embedded bioprinting platform that integrates a six-degrees-of-freedom robotic arm, a pneumatic extrusion system, and a viscoplastic support bath. A streamlined workflow combines CAD modeling, CAM slicing, robotic simulation, and automated execution for efficient fabrication. Two case studies validate the system's ability to print freeform surfaces and vascular-inspired tubular constructs with high fidelity. The results highlight the platform's versatility and potential for complex tissue fabrication and future in situ bioprinting applications.
期刊介绍:
Aims
Bioengineering (ISSN 2306-5354) provides an advanced forum for the science and technology of bioengineering. It publishes original research papers, comprehensive reviews, communications and case reports. Our aim is to encourage scientists to publish their experimental and theoretical results in as much detail as possible. All aspects of bioengineering are welcomed from theoretical concepts to education and applications. There is no restriction on the length of the papers. The full experimental details must be provided so that the results can be reproduced. There are, in addition, four key features of this Journal:
● We are introducing a new concept in scientific and technical publications “The Translational Case Report in Bioengineering”. It is a descriptive explanatory analysis of a transformative or translational event. Understanding that the goal of bioengineering scholarship is to advance towards a transformative or clinical solution to an identified transformative/clinical need, the translational case report is used to explore causation in order to find underlying principles that may guide other similar transformative/translational undertakings.
● Manuscripts regarding research proposals and research ideas will be particularly welcomed.
● Electronic files and software regarding the full details of the calculation and experimental procedure, if unable to be published in a normal way, can be deposited as supplementary material.
● We also accept manuscripts communicating to a broader audience with regard to research projects financed with public funds.
Scope
● Bionics and biological cybernetics: implantology; bio–abio interfaces
● Bioelectronics: wearable electronics; implantable electronics; “more than Moore” electronics; bioelectronics devices
● Bioprocess and biosystems engineering and applications: bioprocess design; biocatalysis; bioseparation and bioreactors; bioinformatics; bioenergy; etc.
● Biomolecular, cellular and tissue engineering and applications: tissue engineering; chromosome engineering; embryo engineering; cellular, molecular and synthetic biology; metabolic engineering; bio-nanotechnology; micro/nano technologies; genetic engineering; transgenic technology
● Biomedical engineering and applications: biomechatronics; biomedical electronics; biomechanics; biomaterials; biomimetics; biomedical diagnostics; biomedical therapy; biomedical devices; sensors and circuits; biomedical imaging and medical information systems; implants and regenerative medicine; neurotechnology; clinical engineering; rehabilitation engineering
● Biochemical engineering and applications: metabolic pathway engineering; modeling and simulation
● Translational bioengineering

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


