D. N. Kuchev, E. V. Poezzhaeva, I. E. Keller, E. Kh. Gumarov, I. N. Gaganova
{"title":"一种用于复杂几何管道诊断的在线机器人复合体算法与控制系统","authors":"D. N. Kuchev, E. V. Poezzhaeva, I. E. Keller, E. Kh. Gumarov, I. N. Gaganova","doi":"10.1134/S1052618825700268","DOIUrl":null,"url":null,"abstract":"<p>Currently, an efficient method for pipeline inspection is in-pipe diagnostics using specialized robotic devices. There are many designs of in-pipe robots; however, they have several drawbacks: most notably, the inability to move through pipelines with complex geometries. Support-and-press in-pipe robots are the most efficient solution for maneuvering within sections of complex geometry. The aim of this research is the synthesis and development of algorithms and a control system for an in-pipe robotic complex, including the study of the kinematics of the design in sections with complex geometry. As a result, a control system structure was developed, consisting of several subsystems, including algorithms for controlling the translational movement of the in-pipe robotic complex inside the pipeline, specifically enabling movement along curved sections without loss of orientation.</p>","PeriodicalId":642,"journal":{"name":"Journal of Machinery Manufacture and Reliability","volume":"54 4","pages":"410 - 417"},"PeriodicalIF":0.4000,"publicationDate":"2025-07-30","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Algorithms and Control System for an In-Line Robotic Complex for Diagnostics of Pipelines of Complex Geometry\",\"authors\":\"D. N. Kuchev, E. V. Poezzhaeva, I. E. Keller, E. Kh. Gumarov, I. N. Gaganova\",\"doi\":\"10.1134/S1052618825700268\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Currently, an efficient method for pipeline inspection is in-pipe diagnostics using specialized robotic devices. There are many designs of in-pipe robots; however, they have several drawbacks: most notably, the inability to move through pipelines with complex geometries. Support-and-press in-pipe robots are the most efficient solution for maneuvering within sections of complex geometry. The aim of this research is the synthesis and development of algorithms and a control system for an in-pipe robotic complex, including the study of the kinematics of the design in sections with complex geometry. As a result, a control system structure was developed, consisting of several subsystems, including algorithms for controlling the translational movement of the in-pipe robotic complex inside the pipeline, specifically enabling movement along curved sections without loss of orientation.</p>\",\"PeriodicalId\":642,\"journal\":{\"name\":\"Journal of Machinery Manufacture and Reliability\",\"volume\":\"54 4\",\"pages\":\"410 - 417\"},\"PeriodicalIF\":0.4000,\"publicationDate\":\"2025-07-30\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Machinery Manufacture and Reliability\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://link.springer.com/article/10.1134/S1052618825700268\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ENGINEERING, MECHANICAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Machinery Manufacture and Reliability","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1134/S1052618825700268","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ENGINEERING, MECHANICAL","Score":null,"Total":0}
Algorithms and Control System for an In-Line Robotic Complex for Diagnostics of Pipelines of Complex Geometry
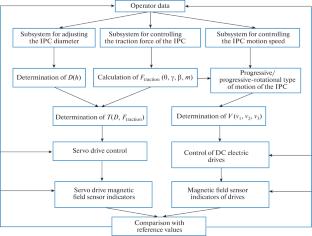
Currently, an efficient method for pipeline inspection is in-pipe diagnostics using specialized robotic devices. There are many designs of in-pipe robots; however, they have several drawbacks: most notably, the inability to move through pipelines with complex geometries. Support-and-press in-pipe robots are the most efficient solution for maneuvering within sections of complex geometry. The aim of this research is the synthesis and development of algorithms and a control system for an in-pipe robotic complex, including the study of the kinematics of the design in sections with complex geometry. As a result, a control system structure was developed, consisting of several subsystems, including algorithms for controlling the translational movement of the in-pipe robotic complex inside the pipeline, specifically enabling movement along curved sections without loss of orientation.
期刊介绍:
Journal of Machinery Manufacture and Reliability is devoted to advances in machine design; CAD/CAM; experimental mechanics of machines, machine life expectancy, and reliability studies; machine dynamics and kinematics; vibration, acoustics, and stress/strain; wear resistance engineering; real-time machine operation diagnostics; robotic systems; new materials and manufacturing processes, and other topics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


