基于目标跟踪和目标调度的选择性激光动态杂草控制
IF 8.9
1区 农林科学
Q1 AGRICULTURE, MULTIDISCIPLINARY
引用次数: 0
摘要
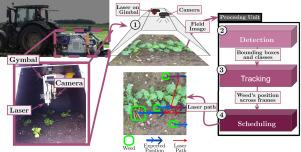
选择性激光应用于杂草控制正在成为最可持续的做法之一,对各种作物。该系统使用具有特定时间和强度设置的激光束来瞄准杂草,通过热损伤消除不需要的植物。然而,这个过程——通常被称为静态杂草激光处理——降低了机器效率,因为平台必须保持静止,直到所有可见的杂草被处理。为了解决这一限制,目前的工作提出了一种动态激光除草方法,该方法可以在平台运动时预测杂草的位置,从而提高作业效率。评估了几种深度学习架构(例如,用于杂草检测的YOLO系列和用于杂草跟踪的DeepSORT),以确定用于检测和跟踪RGB图像中多个杂草的最有效模型。此外,还实现了时间约束调度策略,以确定杂草的处理顺序,最大限度地减少了遗漏目标的数量。我们发现,在严格的时间和能量约束下,后退水平控制提供了最好的性能。现场部署结果表明,YOLOv7在杂草检测中具有最高的精度、召回率和平均平均精度(mAP)。动态激光除草系统的性能明显优于静态系统,其移动速度提高了2.8倍,同时成功处理了90%的检测杂草。这项工作提出了动态除草的概念验证,为智能、自主作物保护系统的未来发展奠定了基础。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Dynamic weed control using selective laser application with object tracking and target scheduling
Selective laser application for weed control is emerging as one of the most sustainable practices for various crops. The system targets weeds using a laser beam with specific time and intensity settings to eliminate undesired plants through thermal damage. However, this process — commonly known as static weed laser treatment — reduces machinery efficiency, as the platform must remain stationary until all visible weeds are treated. To address this limitation, the current work proposes a dynamic laser weeding approach that predicts weed positions while the platform is in motion, thereby improving operational efficiency. Several deep learning architectures (e.g., YOLO series for weed detection and DeepSORT for weed tracking) are evaluated to identify the most effective models for detecting and tracking multiple weeds in RGB images. In addition, a time-constrained scheduling strategy is implemented to determine the order in which weeds are treated, minimizing the number of missed targets. We find that receding horizon control offers the best performance, particularly under strict time and energy constraints. Field deployment results show that YOLOv7 achieves the highest precision, recall, and mean Average Precision (mAP) for weed detection. The dynamic laser weeding system significantly outperforms the static counterpart, enabling up to 2.8 times faster movement while successfully treating 90% of detected weeds. This work presents a proof of concept for dynamic weeding, laying the foundation for future developments in intelligent, autonomous crop protection systems.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Computers and Electronics in Agriculture
工程技术-计算机:跨学科应用
CiteScore
15.30
自引率
14.50%
发文量
800
审稿时长
62 days
期刊介绍:
Computers and Electronics in Agriculture provides international coverage of advancements in computer hardware, software, electronic instrumentation, and control systems applied to agricultural challenges. Encompassing agronomy, horticulture, forestry, aquaculture, and animal farming, the journal publishes original papers, reviews, and applications notes. It explores the use of computers and electronics in plant or animal agricultural production, covering topics like agricultural soils, water, pests, controlled environments, and waste. The scope extends to on-farm post-harvest operations and relevant technologies, including artificial intelligence, sensors, machine vision, robotics, networking, and simulation modeling. Its companion journal, Smart Agricultural Technology, continues the focus on smart applications in production agriculture.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


