可扩展缆索驱动柔性结肠镜执行器的性能评价
IF 4.9
3区 工程技术
Q2 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
摘要
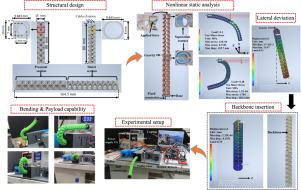
双球囊结肠镜检查(DBC)是一种用于检查小肠的内镜技术,可以进行粘膜活检和诊断。然而,现有的设计面临挑战,包括复杂的驱动、有限的弯曲和低载荷能力,导致更长的过程和患者不适。为了解决这些挑战,本文提出了一种基于电缆驱动驱动的可扩展两段式结肠镜软机器人的设计评估。通过拉伸和收缩四根呈90°分布的电缆,每个部分可以在两个垂直平面上弯曲。它的远端部分也可以伸展和压缩,类似于一个柔软的弹簧。基于Yeoh模型进行了非线性静力分析,验证了原型在考虑应力和挠度的情况下的运动能力。机器人的性能通过进行一系列实验来评估,包括弯曲能力、可重复性和有效载荷能力。结果表明,机器人远端被压缩至正常长度的68%,弯曲角度达到270°。此外,它在承载100克载荷的情况下成功地弯曲。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Performance Evaluation of Extensible Cable-Driven Flexible Actuator for Colonoscopy
Double Balloon Colonoscopy (DBC) is an endoscopic technique used to examine the small bowel, enabling mucosal biopsy and diagnosis. However, existing designs face challenges, including complex actuation, limited bending, and low payload capacity, which lead to longer procedures and patient discomfort. To tackle these challenges, this article presents a design evaluation of an extensible two-section soft robot based on cable-driven actuation for colonoscopy. Each section can bend in two perpendicular planes by tensioning and retracting four cables distributed by 90°. Its distal section can also extend and compress, resembling a soft spring. A nonlinear static analysis based on the Yeoh model is carried out to verify the movement capacity of the prototype concerning stress and deflection. The robot’s performance is evaluated by conducting a series of experiments, including bending capability, repeatability, and payload capacity. The results show that the distal section is compressed up to 68% of its normal length, and the robot achieves a bending angle of 270°. Furthermore, it succeeds in bending while carrying a load of 100 g.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Sensors and Actuators A-physical
工程技术-工程:电子与电气
CiteScore
8.10
自引率
6.50%
发文量
630
审稿时长
49 days
期刊介绍:
Sensors and Actuators A: Physical brings together multidisciplinary interests in one journal entirely devoted to disseminating information on all aspects of research and development of solid-state devices for transducing physical signals. Sensors and Actuators A: Physical regularly publishes original papers, letters to the Editors and from time to time invited review articles within the following device areas:
• Fundamentals and Physics, such as: classification of effects, physical effects, measurement theory, modelling of sensors, measurement standards, measurement errors, units and constants, time and frequency measurement. Modeling papers should bring new modeling techniques to the field and be supported by experimental results.
• Materials and their Processing, such as: piezoelectric materials, polymers, metal oxides, III-V and II-VI semiconductors, thick and thin films, optical glass fibres, amorphous, polycrystalline and monocrystalline silicon.
• Optoelectronic sensors, such as: photovoltaic diodes, photoconductors, photodiodes, phototransistors, positron-sensitive photodetectors, optoisolators, photodiode arrays, charge-coupled devices, light-emitting diodes, injection lasers and liquid-crystal displays.
• Mechanical sensors, such as: metallic, thin-film and semiconductor strain gauges, diffused silicon pressure sensors, silicon accelerometers, solid-state displacement transducers, piezo junction devices, piezoelectric field-effect transducers (PiFETs), tunnel-diode strain sensors, surface acoustic wave devices, silicon micromechanical switches, solid-state flow meters and electronic flow controllers.
Etc...
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


