{"title":"基于语义分割和肢肢运动的铰接履带机器人越障规划框架。","authors":"Pu Zhang, Junhang Liu, Yongling Fu, Jian Sun","doi":"10.3390/biomimetics10090627","DOIUrl":null,"url":null,"abstract":"<p><p>Articulated tracked robots (ATRs) equipped with dual active flippers are widely used due to their ability to climb over complex obstacles like animals with legs. This paper presents a novel planning framework designed to empower ATRs with the capability of autonomously generating global paths that integrate obstacle-crossing maneuvers in complex terrains. This advancement effectively mitigates the issue of excessive dependence on remote human control, thereby enhancing the operational efficiency and adaptability of ATRs in challenging environments. The framework consists of three core components. First, a lightweight DeepLab V3+ architecture augmented with an edge-aware module is used for real-time semantic segmentation of elevation maps. Second, a simplified model of the robot-terrain contact is constructed to rapidly calculate the robot's pose at map sampling points through contact point traversal. Finally, based on rapidly-exploring random trees, the cost of flipper motion smoothness is incorporated into the search process, achieving collaborative planning of passable paths and flipper maneuvers in obstacle-crossing scenarios. The framework was tested on our Crawler robot, which can quickly and accurately identify flat areas, obstacle-crossing areas, and impassable areas, avoiding redundant planning in non-obstacle areas. Compared to manually operated remote control, the planned path demonstrated shorter travel time, better stability, and lower flipper energy expenditure. This framework offers substantial practical value for autonomous navigation in demanding environments.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 9","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-09-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467243/pdf/","citationCount":"0","resultStr":"{\"title\":\"A Planning Framework Based on Semantic Segmentation and Flipper Motions for Articulated Tracked Robot in Obstacle-Crossing Terrain.\",\"authors\":\"Pu Zhang, Junhang Liu, Yongling Fu, Jian Sun\",\"doi\":\"10.3390/biomimetics10090627\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Articulated tracked robots (ATRs) equipped with dual active flippers are widely used due to their ability to climb over complex obstacles like animals with legs. This paper presents a novel planning framework designed to empower ATRs with the capability of autonomously generating global paths that integrate obstacle-crossing maneuvers in complex terrains. This advancement effectively mitigates the issue of excessive dependence on remote human control, thereby enhancing the operational efficiency and adaptability of ATRs in challenging environments. The framework consists of three core components. First, a lightweight DeepLab V3+ architecture augmented with an edge-aware module is used for real-time semantic segmentation of elevation maps. Second, a simplified model of the robot-terrain contact is constructed to rapidly calculate the robot's pose at map sampling points through contact point traversal. Finally, based on rapidly-exploring random trees, the cost of flipper motion smoothness is incorporated into the search process, achieving collaborative planning of passable paths and flipper maneuvers in obstacle-crossing scenarios. The framework was tested on our Crawler robot, which can quickly and accurately identify flat areas, obstacle-crossing areas, and impassable areas, avoiding redundant planning in non-obstacle areas. Compared to manually operated remote control, the planned path demonstrated shorter travel time, better stability, and lower flipper energy expenditure. This framework offers substantial practical value for autonomous navigation in demanding environments.</p>\",\"PeriodicalId\":8907,\"journal\":{\"name\":\"Biomimetics\",\"volume\":\"10 9\",\"pages\":\"\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2025-09-17\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467243/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomimetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/biomimetics10090627\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10090627","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
A Planning Framework Based on Semantic Segmentation and Flipper Motions for Articulated Tracked Robot in Obstacle-Crossing Terrain.
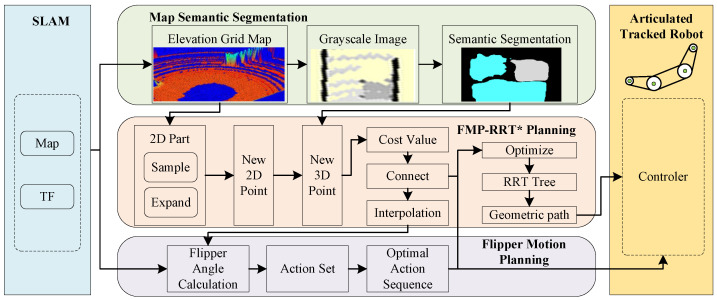
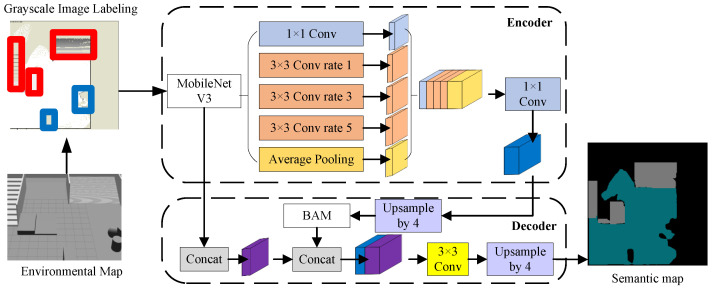
Articulated tracked robots (ATRs) equipped with dual active flippers are widely used due to their ability to climb over complex obstacles like animals with legs. This paper presents a novel planning framework designed to empower ATRs with the capability of autonomously generating global paths that integrate obstacle-crossing maneuvers in complex terrains. This advancement effectively mitigates the issue of excessive dependence on remote human control, thereby enhancing the operational efficiency and adaptability of ATRs in challenging environments. The framework consists of three core components. First, a lightweight DeepLab V3+ architecture augmented with an edge-aware module is used for real-time semantic segmentation of elevation maps. Second, a simplified model of the robot-terrain contact is constructed to rapidly calculate the robot's pose at map sampling points through contact point traversal. Finally, based on rapidly-exploring random trees, the cost of flipper motion smoothness is incorporated into the search process, achieving collaborative planning of passable paths and flipper maneuvers in obstacle-crossing scenarios. The framework was tested on our Crawler robot, which can quickly and accurately identify flat areas, obstacle-crossing areas, and impassable areas, avoiding redundant planning in non-obstacle areas. Compared to manually operated remote control, the planned path demonstrated shorter travel time, better stability, and lower flipper energy expenditure. This framework offers substantial practical value for autonomous navigation in demanding environments.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


