{"title":"下肢外骨骼异常步态相位识别与肢体角度预测。","authors":"Sheng Wang, Chunjie Chen, Xiaojun Wu","doi":"10.3390/biomimetics10090623","DOIUrl":null,"url":null,"abstract":"<p><p>The phase detection of abnormal gait and the prediction of lower-limb angles are key challenges in controlling lower-limb exoskeletons. This study simulated three types of abnormal gaits: scissor gait, foot-drop gait, and staggering gait. To enhance the recognition capability for abnormal gait phases, a four-discrete-phase division for a single leg is proposed: pre-swing, swing, swing termination, and stance phases. The four phases of both legs further constitute four stages of walking. Using the Euler angles of the ankle joints as inputs, the capabilities of a Convolutional Neural Network and a Support Vector Machine in recognizing discrete gait phases are verified. Based on these discrete gait phases, a continuous phase estimation is further performed using an adaptive frequency oscillator. For predicting the lower-limb motion angle, this study innovatively proposes an input scheme that integrates three-axis ankle joint angles and continuous gait phases. Comparative experiments confirmed that this information fusion scheme improved the limb angle prediction accuracy, with the Convolutional Neural Network-Long Short-Term Memory network yielding the best prediction results.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 9","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-09-16","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467789/pdf/","citationCount":"0","resultStr":"{\"title\":\"Abnormal Gait Phase Recognition and Limb Angle Prediction in Lower-Limb Exoskeletons.\",\"authors\":\"Sheng Wang, Chunjie Chen, Xiaojun Wu\",\"doi\":\"10.3390/biomimetics10090623\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>The phase detection of abnormal gait and the prediction of lower-limb angles are key challenges in controlling lower-limb exoskeletons. This study simulated three types of abnormal gaits: scissor gait, foot-drop gait, and staggering gait. To enhance the recognition capability for abnormal gait phases, a four-discrete-phase division for a single leg is proposed: pre-swing, swing, swing termination, and stance phases. The four phases of both legs further constitute four stages of walking. Using the Euler angles of the ankle joints as inputs, the capabilities of a Convolutional Neural Network and a Support Vector Machine in recognizing discrete gait phases are verified. Based on these discrete gait phases, a continuous phase estimation is further performed using an adaptive frequency oscillator. For predicting the lower-limb motion angle, this study innovatively proposes an input scheme that integrates three-axis ankle joint angles and continuous gait phases. Comparative experiments confirmed that this information fusion scheme improved the limb angle prediction accuracy, with the Convolutional Neural Network-Long Short-Term Memory network yielding the best prediction results.</p>\",\"PeriodicalId\":8907,\"journal\":{\"name\":\"Biomimetics\",\"volume\":\"10 9\",\"pages\":\"\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2025-09-16\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467789/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomimetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/biomimetics10090623\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10090623","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Abnormal Gait Phase Recognition and Limb Angle Prediction in Lower-Limb Exoskeletons.
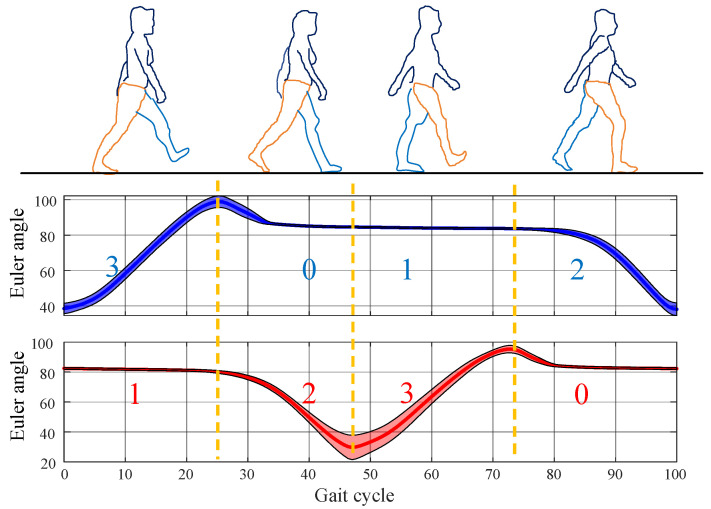
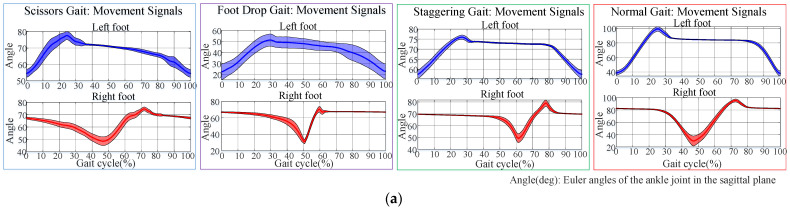
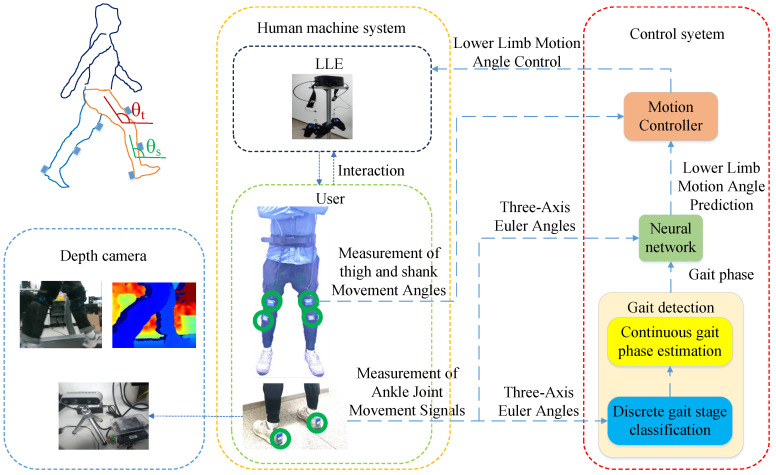
The phase detection of abnormal gait and the prediction of lower-limb angles are key challenges in controlling lower-limb exoskeletons. This study simulated three types of abnormal gaits: scissor gait, foot-drop gait, and staggering gait. To enhance the recognition capability for abnormal gait phases, a four-discrete-phase division for a single leg is proposed: pre-swing, swing, swing termination, and stance phases. The four phases of both legs further constitute four stages of walking. Using the Euler angles of the ankle joints as inputs, the capabilities of a Convolutional Neural Network and a Support Vector Machine in recognizing discrete gait phases are verified. Based on these discrete gait phases, a continuous phase estimation is further performed using an adaptive frequency oscillator. For predicting the lower-limb motion angle, this study innovatively proposes an input scheme that integrates three-axis ankle joint angles and continuous gait phases. Comparative experiments confirmed that this information fusion scheme improved the limb angle prediction accuracy, with the Convolutional Neural Network-Long Short-Term Memory network yielding the best prediction results.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


