Yu Zhang, Linghui Peng, Wenchuan Zhao, Ning Wang, Zheng Zhang
{"title":"多自由度仿生气动软执行器的设计与机器学习建模。","authors":"Yu Zhang, Linghui Peng, Wenchuan Zhao, Ning Wang, Zheng Zhang","doi":"10.3390/biomimetics10090615","DOIUrl":null,"url":null,"abstract":"<p><p>A novel multi-degree-of-freedom bionic Soft Pneumatic Actuator (SPA) inspired by the shoulder joint of a sea turtle is proposed. The SPA is mainly composed of a combination of oblique chamber actuator units capable of omnidirectional bending and bi-directional twisting, which can restore the multi-modal motions of a sea turtle's flipper limb in three-dimensional space. To address the nonlinear behavior of the complex structure of SPA, traditional modeling is difficult. The attitude information of each axis of the actuator is extracted in real time using a high-precision Inertial Measurement Unit (IMU), and the attitude outputs of the SPA are modeled using six machine learning methods. The results show that the XGBoost model performs best in attitude modeling. Its R<sup>2</sup> can reach 0.974, and the average absolute errors of angles in Roll, Pitch, and Yaw axes are 1.315°, 1.543°, and 1.048°, respectively. The multi-axis attitude of the SPA can be predicted with high accuracy in real time. The studies on deformation capability, actuation output performance, and underwater validation experiments demonstrate that the SPA meets the bionic sea turtle shoulder joint requirements. This study provides a new theoretical foundation and technical path for the development, control, and bionic application of complex multi-degree-of-freedom SPA systems.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 9","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-09-12","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467428/pdf/","citationCount":"0","resultStr":"{\"title\":\"Design and Machine Learning Modeling of a Multi-Degree-of-Freedom Bionic Pneumatic Soft Actuator.\",\"authors\":\"Yu Zhang, Linghui Peng, Wenchuan Zhao, Ning Wang, Zheng Zhang\",\"doi\":\"10.3390/biomimetics10090615\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>A novel multi-degree-of-freedom bionic Soft Pneumatic Actuator (SPA) inspired by the shoulder joint of a sea turtle is proposed. The SPA is mainly composed of a combination of oblique chamber actuator units capable of omnidirectional bending and bi-directional twisting, which can restore the multi-modal motions of a sea turtle's flipper limb in three-dimensional space. To address the nonlinear behavior of the complex structure of SPA, traditional modeling is difficult. The attitude information of each axis of the actuator is extracted in real time using a high-precision Inertial Measurement Unit (IMU), and the attitude outputs of the SPA are modeled using six machine learning methods. The results show that the XGBoost model performs best in attitude modeling. Its R<sup>2</sup> can reach 0.974, and the average absolute errors of angles in Roll, Pitch, and Yaw axes are 1.315°, 1.543°, and 1.048°, respectively. The multi-axis attitude of the SPA can be predicted with high accuracy in real time. The studies on deformation capability, actuation output performance, and underwater validation experiments demonstrate that the SPA meets the bionic sea turtle shoulder joint requirements. This study provides a new theoretical foundation and technical path for the development, control, and bionic application of complex multi-degree-of-freedom SPA systems.</p>\",\"PeriodicalId\":8907,\"journal\":{\"name\":\"Biomimetics\",\"volume\":\"10 9\",\"pages\":\"\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2025-09-12\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467428/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomimetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/biomimetics10090615\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10090615","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Design and Machine Learning Modeling of a Multi-Degree-of-Freedom Bionic Pneumatic Soft Actuator.
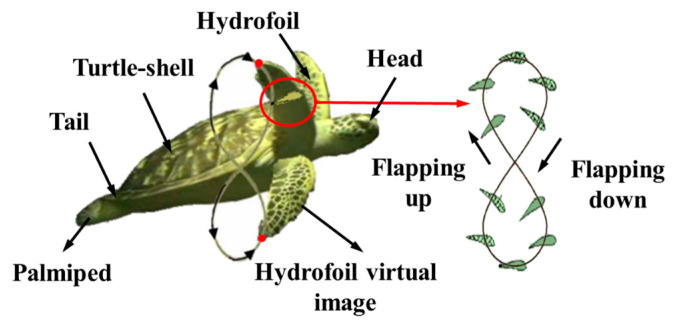
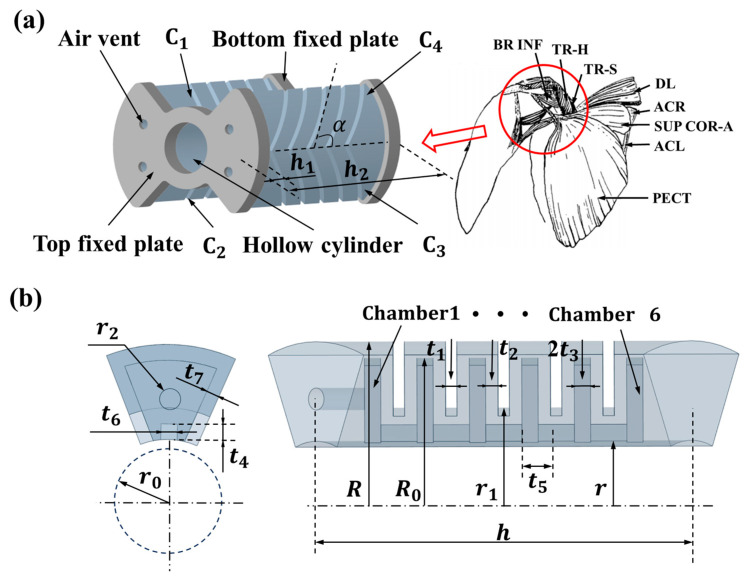
A novel multi-degree-of-freedom bionic Soft Pneumatic Actuator (SPA) inspired by the shoulder joint of a sea turtle is proposed. The SPA is mainly composed of a combination of oblique chamber actuator units capable of omnidirectional bending and bi-directional twisting, which can restore the multi-modal motions of a sea turtle's flipper limb in three-dimensional space. To address the nonlinear behavior of the complex structure of SPA, traditional modeling is difficult. The attitude information of each axis of the actuator is extracted in real time using a high-precision Inertial Measurement Unit (IMU), and the attitude outputs of the SPA are modeled using six machine learning methods. The results show that the XGBoost model performs best in attitude modeling. Its R2 can reach 0.974, and the average absolute errors of angles in Roll, Pitch, and Yaw axes are 1.315°, 1.543°, and 1.048°, respectively. The multi-axis attitude of the SPA can be predicted with high accuracy in real time. The studies on deformation capability, actuation output performance, and underwater validation experiments demonstrate that the SPA meets the bionic sea turtle shoulder joint requirements. This study provides a new theoretical foundation and technical path for the development, control, and bionic application of complex multi-degree-of-freedom SPA systems.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


