Roberto Soldi, Bruna Maria Vittoria Guerra, Stefania Sozzi, Leo Russo, Serena Pizzocaro, Renato Baptista, Alessandro Marco De Nunzio, Micaela Schmid, Stefano Ramat
{"title":"基于外骨骼辅助行走肌电图数据的步态相位识别的深度学习模型优化。","authors":"Roberto Soldi, Bruna Maria Vittoria Guerra, Stefania Sozzi, Leo Russo, Serena Pizzocaro, Renato Baptista, Alessandro Marco De Nunzio, Micaela Schmid, Stefano Ramat","doi":"10.3390/biomimetics10090617","DOIUrl":null,"url":null,"abstract":"<p><p>Exoskeletons are a fast-growing technology that enables multiple use-cases in clinical scenarios. They can be useful tools for the rehabilitation of patients with motor dysfunctions caused by neurological conditions, aging or trauma. Assistive exoskeletons modulate the torque exerted by the electrical motors moving their joints to allow the patients wearing them to achieve an intended movement, such as gait, correctly. Their effectiveness, therefore, requires accurate online control of such torques to complement those generated by the patient. Hereby we explored Deep Learning (DL) models to generate an online prediction of the gait phase, i.e., stance or swing, during assisted walking with a lower-limb exoskeleton based on surface electromyography (sEMG) data. We leveraged the lead of muscular activation with respect to the movement of the limbs to adjust the labeling based on joints kinematics. The cross-subject design allowed to generalize over subjects not considered for training A hyperparameter optimization algorithm was also implemented to further explore the capabilities of DL models of a reduced size. We simulated a use case scenario to assess whether online implementation of the proposed technique is feasible. We also proposed a new metric called trade-of score (<i>TOS</i>) for evaluating the cost-performance compromise of the optimized models which lead to identifying a DL model capable of classifying gait phases with an accuracy of about 95% while significantly reducing the number of parameters compared to the full architecture. Its mean computational time of less than 10 ms offers the opportunity for accurate, online exoskeleton control based on sEMG data.</p>","PeriodicalId":8907,"journal":{"name":"Biomimetics","volume":"10 9","pages":""},"PeriodicalIF":3.9000,"publicationDate":"2025-09-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467064/pdf/","citationCount":"0","resultStr":"{\"title\":\"Deep Learning Models Optimization for Gait Phase Identification from EMG Data During Exoskeleton-Assisted Walking.\",\"authors\":\"Roberto Soldi, Bruna Maria Vittoria Guerra, Stefania Sozzi, Leo Russo, Serena Pizzocaro, Renato Baptista, Alessandro Marco De Nunzio, Micaela Schmid, Stefano Ramat\",\"doi\":\"10.3390/biomimetics10090617\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Exoskeletons are a fast-growing technology that enables multiple use-cases in clinical scenarios. They can be useful tools for the rehabilitation of patients with motor dysfunctions caused by neurological conditions, aging or trauma. Assistive exoskeletons modulate the torque exerted by the electrical motors moving their joints to allow the patients wearing them to achieve an intended movement, such as gait, correctly. Their effectiveness, therefore, requires accurate online control of such torques to complement those generated by the patient. Hereby we explored Deep Learning (DL) models to generate an online prediction of the gait phase, i.e., stance or swing, during assisted walking with a lower-limb exoskeleton based on surface electromyography (sEMG) data. We leveraged the lead of muscular activation with respect to the movement of the limbs to adjust the labeling based on joints kinematics. The cross-subject design allowed to generalize over subjects not considered for training A hyperparameter optimization algorithm was also implemented to further explore the capabilities of DL models of a reduced size. We simulated a use case scenario to assess whether online implementation of the proposed technique is feasible. We also proposed a new metric called trade-of score (<i>TOS</i>) for evaluating the cost-performance compromise of the optimized models which lead to identifying a DL model capable of classifying gait phases with an accuracy of about 95% while significantly reducing the number of parameters compared to the full architecture. Its mean computational time of less than 10 ms offers the opportunity for accurate, online exoskeleton control based on sEMG data.</p>\",\"PeriodicalId\":8907,\"journal\":{\"name\":\"Biomimetics\",\"volume\":\"10 9\",\"pages\":\"\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2025-09-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12467064/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biomimetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.3390/biomimetics10090617\",\"RegionNum\":3,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomimetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.3390/biomimetics10090617","RegionNum":3,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
Deep Learning Models Optimization for Gait Phase Identification from EMG Data During Exoskeleton-Assisted Walking.
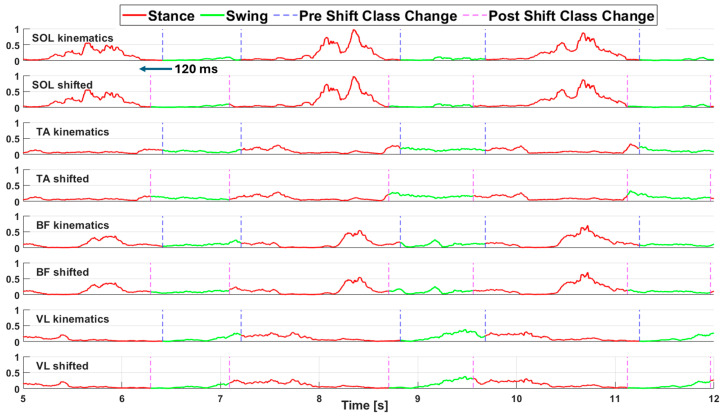
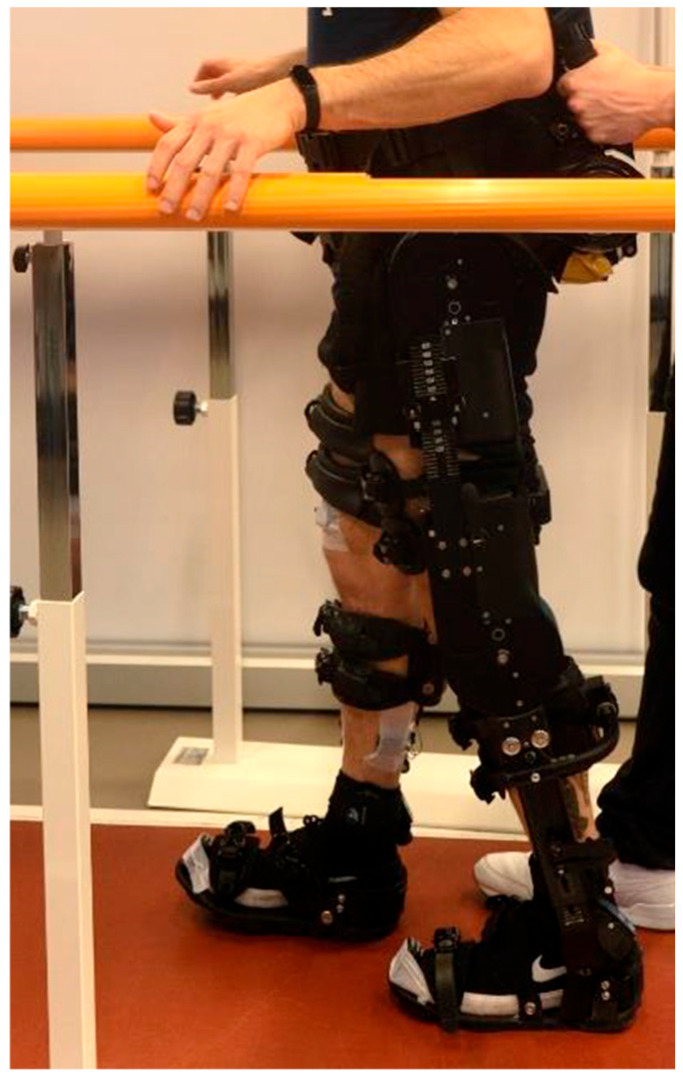
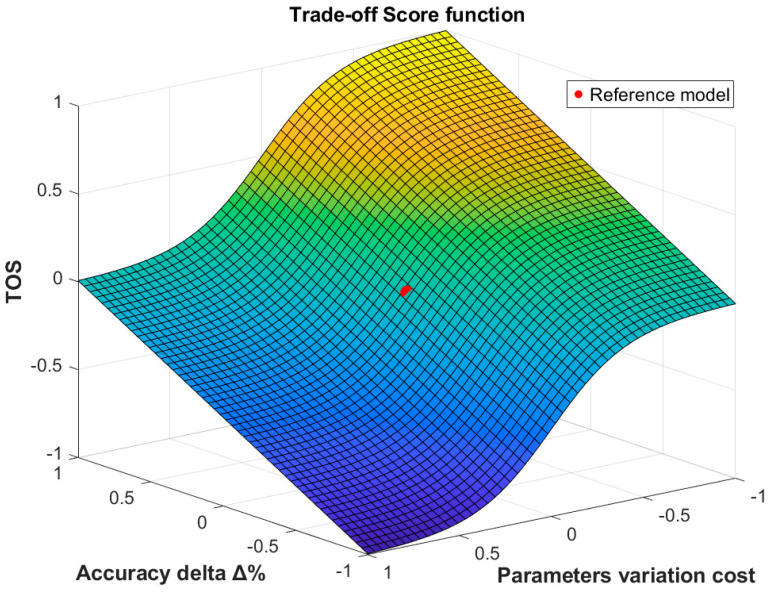
Exoskeletons are a fast-growing technology that enables multiple use-cases in clinical scenarios. They can be useful tools for the rehabilitation of patients with motor dysfunctions caused by neurological conditions, aging or trauma. Assistive exoskeletons modulate the torque exerted by the electrical motors moving their joints to allow the patients wearing them to achieve an intended movement, such as gait, correctly. Their effectiveness, therefore, requires accurate online control of such torques to complement those generated by the patient. Hereby we explored Deep Learning (DL) models to generate an online prediction of the gait phase, i.e., stance or swing, during assisted walking with a lower-limb exoskeleton based on surface electromyography (sEMG) data. We leveraged the lead of muscular activation with respect to the movement of the limbs to adjust the labeling based on joints kinematics. The cross-subject design allowed to generalize over subjects not considered for training A hyperparameter optimization algorithm was also implemented to further explore the capabilities of DL models of a reduced size. We simulated a use case scenario to assess whether online implementation of the proposed technique is feasible. We also proposed a new metric called trade-of score (TOS) for evaluating the cost-performance compromise of the optimized models which lead to identifying a DL model capable of classifying gait phases with an accuracy of about 95% while significantly reducing the number of parameters compared to the full architecture. Its mean computational time of less than 10 ms offers the opportunity for accurate, online exoskeleton control based on sEMG data.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


