非轴对称管状结构机器人缠绕丝的柔性路径规划算法
IF 7.1
2区 材料科学
Q1 MATERIALS SCIENCE, COMPOSITES
引用次数: 0
摘要
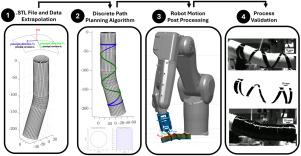
随着自动化程度的提高和复合材料在制造过程中的使用,长丝缠绕技术是最有趣和最有吸引力的技术之一。虽然这项技术已经在机器人系统的支持下被广泛用于生产大型和典型的轴对称部件,但在较小和更复杂的物体的市场上,情况却并非如此。该领域真正缺乏的是开发健壮且灵活的算法,这些算法能够在主要信息来自STL文件的复杂真实对象上规划路径。本文提出了一种基于IPS和NIS的离散路径规划算法。该算法利用STL几何形状和摩擦力的信息,主动控制缠绕角,更灵活地规划轨迹。它的非迭代方法保证了较少的计算量,并且生成的轨迹简化了以前算法中沿测地线方向的传输条件。该算法首先通过解析定义的几何形状(误差低于2%)进行验证,随后将其应用于不同复杂程度的几何形状,证明了其鲁棒性和准确性。以非轴对称管状结构为例进行了研究。对不同绕组角度(45°至80°)的测试表明,基于新算法的工艺是可行的。得到的结果误差一般在5°以下,证明了溶液的稳定性和准确性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
A novel and flexible path planning algorithm for robotic filament winding of non-axisymmetric tubular structures
With the increasing automation and use of composite materials in manufacturing processes, one of the most interesting and attractive technologies is Filament Winding. While this technology is already widely used with the support of robotic systems for the production of large and typically axisymmetric components, the same cannot be said when looking at the market for smaller and more complex objects. The real lack in this area is the development of robust and flexible algorithms capable of planning a path on complex real objects whose main information is derived from STL files. In this work, a new discrete algorithm for path planning based on IPS and NIS is proposed. This algorithm exploits information derived from STL geometries and friction to actively control the winding angle and to plan the trajectory with more flexibility. Its non-iterative approach ensures less computational effort, and the generated trajectory simplifies the transport condition along the geodesic direction used in previous algorithms. The algorithm was first validated with an analytically defined geometry (with errors below 2%) and subsequently its application was extended to geometries of varying degrees of complexity, demonstrating its robustness and accuracy. A non-axisymmetric tubular structure was used as a case study. Tests performed for different winding angles (45°to 80°) demonstrated the feasibility of the process based on the new algorithm. The results obtained with errors generally below 5°testify to the stability and accuracy of the solution.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Composite Structures
工程技术-材料科学:复合
CiteScore
12.00
自引率
12.70%
发文量
1246
审稿时长
78 days
期刊介绍:
The past few decades have seen outstanding advances in the use of composite materials in structural applications. There can be little doubt that, within engineering circles, composites have revolutionised traditional design concepts and made possible an unparalleled range of new and exciting possibilities as viable materials for construction. Composite Structures, an International Journal, disseminates knowledge between users, manufacturers, designers and researchers involved in structures or structural components manufactured using composite materials.
The journal publishes papers which contribute to knowledge in the use of composite materials in engineering structures. Papers deal with design, research and development studies, experimental investigations, theoretical analysis and fabrication techniques relevant to the application of composites in load-bearing components for assemblies, ranging from individual components such as plates and shells to complete composite structures.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


