外攀管式压电驱动器,具有高攀爬/拖曳能力和无系绳运动
IF 9.4
1区 工程技术
Q1 ENGINEERING, MECHANICAL
International Journal of Mechanical Sciences
Pub Date : 2025-09-16
DOI:10.1016/j.ijmecsci.2025.110840
引用次数: 0
摘要
为了实现高攀爬/拖曳能力和无系绳运动,将一对压电堆叠板驱动的翼形换能器与板载电路集成在一起,研制了一种微型外攀管式压电驱动器(mepca)。在这里,换能器分别与驱动脚和弹簧一起提供爬升和夹紧功能;有趣的是,这些动作模仿了树懒上肢和下肢的推进和拥抱功能。微控制器、升压模块和按h桥形状排列的晶体管构成了轻型板载电路的最小系统。为了验证我们的建议,首先,通过建立振动模型,设计换能器在不过度增加重量的情况下增强驱动力。同时,考虑表面粗糙度对摩擦系数进行修正,预测爬坡/拖曳性能。然后,制作了机械部件尺寸为52 × 35 × 72 mm3,重量为20.5 g的原型机进行性能评估。mepca以系绳方式垂直向上爬上玻璃管,最大拖拽重量为120g(相当于机械部件重量的5.9倍),最大速度为103.8 mm/s。mepca安装了一个12v 300-mAh的电池,成功地以45°的倾斜角度爬上管道,并在倾斜角度为30°时产生了最大的牵引重量,最大的爬升速度和最小的逐级位移分别为20 g, 18 mm/s和0.36 μm。据我们所知,本研究是关于压电致动器无系绳式爬升的初步报告。为设计适用于狭窄环境特别是缺乏外部电源的微型压电驱动器提供了基础技术。本文章由计算机程序翻译,如有差异,请以英文原文为准。
External-pipe-climbing piezoelectric actuator with high climbing/towing capability and untethered movement
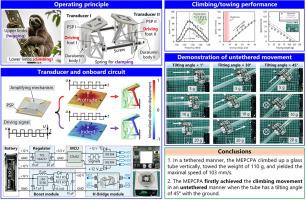
To accomplish high climbing/towing capability and untethered movement, a miniature external-pipe-climbing piezoelectric actuator (MEPCPA) is developed by integrating a pair of wing-shaped transducers driven by piezoelectric stack plates and an onboard circuit. Here, the transducers provide the climbing and clamping functions with the driving feet and the spring, respectively; these interestingly imitate the propelling and hugging functions of the sloth’s lower and upper limbs. The micro controller, boost module, and transistors arranged in the H-bridge shape form the minimum system of a lightweight onboard circuit. To verify our proposal, first, by constructing a vibration model, the transducer was designed to enhance the driving force without excessively increasing the weight. Meanwhile, the friction coefficient was modified by considering the surface roughness to predict the climbing/towing performance. Then, a prototype whose mechanical part had the size of 52 × 35 × 72 mm3 and the weight of 20.5 g was fabricated for performance assessment. In a tethered manner, the MEPCPA climbed up the glass tube vertically, towed the maximal weight of 120 g (equal to 5.9 times the mechanical part’s weight), and yielded the maximal speed of 103.8 mm/s. Installed with a 12-V 300-mAh battery, the MEPCPA successfully climbed up the tube having the tilting angle of 45° with the ground and it produced the maximal towing weight, the maximal climbing speed, and the minimal stepwise displacement of 20 g, 18 mm/s, and 0.36 μm, respectively, at the tilting angle of 30° To the best of our knowledge, this study is an initial report regarding piezoelectric actuators climbable in an untethered manner, and provides fundamental technique for designing miniature piezoelectric actuators potentially applicable to narrow environments particularly lacking external power source.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

International Journal of Mechanical Sciences
工程技术-工程:机械
CiteScore
12.80
自引率
17.80%
发文量
769
审稿时长
19 days
期刊介绍:
The International Journal of Mechanical Sciences (IJMS) serves as a global platform for the publication and dissemination of original research that contributes to a deeper scientific understanding of the fundamental disciplines within mechanical, civil, and material engineering.
The primary focus of IJMS is to showcase innovative and ground-breaking work that utilizes analytical and computational modeling techniques, such as Finite Element Method (FEM), Boundary Element Method (BEM), and mesh-free methods, among others. These modeling methods are applied to diverse fields including rigid-body mechanics (e.g., dynamics, vibration, stability), structural mechanics, metal forming, advanced materials (e.g., metals, composites, cellular, smart) behavior and applications, impact mechanics, strain localization, and other nonlinear effects (e.g., large deflections, plasticity, fracture).
Additionally, IJMS covers the realms of fluid mechanics (both external and internal flows), tribology, thermodynamics, and materials processing. These subjects collectively form the core of the journal's content.
In summary, IJMS provides a prestigious platform for researchers to present their original contributions, shedding light on analytical and computational modeling methods in various areas of mechanical engineering, as well as exploring the behavior and application of advanced materials, fluid mechanics, thermodynamics, and materials processing.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


