机器人辅助腹腔镜手术的3d扫描孔检测
IF 1.8
Q3 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
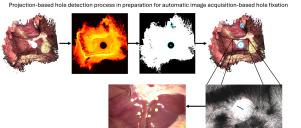
微创腹腔镜手术,内窥镜和器械通过小切口插入,已经进入下一个发展阶段:机器人辅助微创手术。这些系统使用一个摄像头和由人类外科医生通过人在环控制操作的机器人操纵器。为了进一步提高手术的精确性和自主性,必须扩大数据驱动的辅助。一种很有前途的方法是基于内窥镜图像的3D重建。30°内窥镜尖端通过围绕仪器轴的旋转运动来增强视野。然而,当使用这种内窥镜进行3D扫描时,固有的盲点沿着轴轴形成,在旋转过程中产生无法捕获的区域。由于解剖几何和扫描期间特定内窥镜姿势的闭塞,可能会出现额外的丢失数据。这些限制导致三维重建不完整,对手术导航和决策产生负面影响。本文提出了一种适合于医学应用的方法,用于检测和表征腹腔镜3D扫描中的孔。该方法利用点云的几何分析来识别数据稀疏或缺失的区域,并将这些空白与内窥镜定位和解剖可见性相关联。它被设计成在由先进的腹腔镜三维重建系统产生的高密度点云上稳健地运行。该方法结合机器人控制,为内窥镜自适应定位提供了基础,以恢复缺失视图,提高重建的完整性。所提出的方法为在腹腔镜环境中优化3D扫描的快速(~ 5秒)反馈铺平了道路。本文章由计算机程序翻译,如有差异,请以英文原文为准。
3D-Scan hole detection for robot-assisted laparoscopic surgery
Minimally invasive laparoscopic surgery, where endoscopes and instruments are inserted through small incisions, has advanced to the next stage of development: robot-assisted minimally invasive surgery. These systems use a camera and robotic manipulators operated by human surgeons through human-in-the-loop control. To further improve surgical precision and autonomy, data-driven assistance must be expanded. One promising approach is 3D reconstruction based on endoscopic images. A 30°endoscope tip enhances the field of view by enabling rotational motion around the instrument’s axis. However, when performing a 3D scan with such an endoscope, a blind spot inherently forms along the shaft axis, creating a region that cannot be captured during rotation. Additional missing data may arise due to occlusions from anatomical geometry and the specific endoscope pose during a scan. These limitations result in incomplete 3D reconstructions, which can negatively impact surgical navigation and decision-making. This paper presents a method tailored to medical applications for detecting and characterizing holes in laparoscopic 3D scans. The proposed method uses geometric analysis of the point cloud to identify regions of sparse or missing data and correlates these gaps with endoscope positioning and anatomical visibility. It is designed to operate robustly on high-density point clouds generated by advanced laparoscopic 3D reconstruction systems. By integrating robotic control, our method provides a foundation for adaptive endoscope repositioning to recover missing views and improve reconstruction completeness. The proposed method paves the way towards fast (5 s) feedback for optimized 3D scanning in laparoscopic environments.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

IFAC Journal of Systems and Control
AUTOMATION & CONTROL SYSTEMS-
CiteScore
3.70
自引率
5.30%
发文量
17
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


