先进的YOLOv4实时水下目标检测:面向应用的方法
IF 6.6
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
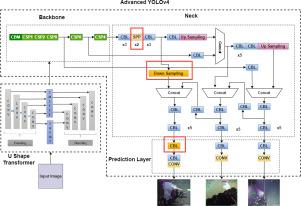
由于能见度有限和海洋生物多样性的存在,在海洋水产养殖中检测碎片和监测海洋生物面临挑战。由于光线衰减和水体浑浊,AUV的水下目标检测本身就比陆地更具挑战性,特别是对于模糊图像中的小而密集的目标,难以提取高质量的特征。在本文中,我们通过改进图像增强、数据增强和特征聚合,提出了一种有效的实时水下目标检测方法。首先,采用u形变压器对原始图像进行增强。对于数据增强,可以观察到马赛克数据增强虽然增强了复杂图像,但由于生成的小目标图像数量较少,无法改善小目标检测。为了解决这一限制,我们提出了水下马赛克(U-Mosaic),这是一种改进的马赛克数据增强技术,旨在增强小目标检测。此外,有人指出,现有的YOLOv4在检测水下图像中的小而密集的物体时遇到了困难,因为降采样、图像质量等原因,无法获得足够的小物体特征,并且在选择锚盒尺寸方面也存在困难。因此,我们提出了一种名为Advanced YOLOv4的模型,专门用于水下目标检测。本文提出的高级YOLOv4通过改变YOLOv4的颈部和预测层来提高目标检测效率。此外,我们引入了一个额外的空间金字塔池层来聚合特征并降低特征维度,从而提高目标检测率。此外,建议的工作集中在非常大的目标检测,并为此目的在检测大目标期间使用降采样。提出的方法通过两个不同的应用领域进行了验证:(i)检测和定位碎片(ii)从水下图像中检测鱼类。为了验证,使用Trash ICRA19数据集进行碎片检测,而使用Brackish数据集进行鱼类检测。使用图像增强评估指标UIQM和UCIQE来衡量增强后的图像质量,发现两种数据集的图像质量都提高了20%以上。在平均平均精度(mAP)方面,本文提出的实时水下目标检测模型比单级目标检测器YOLOv3、YOLOv4、YOLOv5、YOLOv7和KPE-YOLOv5高出5%。同时提出了两级检波器RCNN的比较工作,发现mAP比RCNN好8%。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Advanced YOLOv4 for real-time underwater object detection: An application-oriented approach
Detecting debris and monitoring marine life in sea aquaculture face challenges due to limited visibility and the presence of diverse. Underwater object detection by Autonomous Unmanned Vehicle(AUV) is inherently more challenging than land due to light attenuation and water turbidity, especially for small and dense objects in murky images, where extracting high-quality features is hindered. In this paper, we present an efficient approach for real-time underwater object detection through improvements in image enhancement, data augmentation, and feature aggregation. Initially, U-Shape Transformer is applied to enhance the original images. For data augmentation, it is observable that while Mosaic data augmentation enhances complex images but fails to improve small-object detection due generation of less number of images with small objects. To address this limitation, we propose Underwater-Mosaic (U-Mosaic), a modified Mosaic data augmentation technique designed to enhance small-object detection. Additionally, it was noted that existing YOLOv4 struggles with detecting small and densely populated objects in underwater images as unable to get sufficient features for small objects due to downsampling, image quality and also found difficulty in selecting anchor box size. Therefore, we propose a model called Advanced YOLOv4, tailored for underwater object detection. The proposed Advanced YOLOv4 aims to improve object detection efficiency by altering the neck and prediction layers of YOLOv4. Moreover, we introduce an additional spatial pyramid pooling layer to aggregate features and reduce feature dimensions thereby improving object detection rates. Also, the proposed work concentrates on very large object detection and for this purpose used downsampling during the detection of large objects. The proposed approach is validated through two distinct application areas: (i) detecting and locating debris (ii) detecting fish from underwater images. For validation, the Trash ICRA19 dataset is used for debris detection, while the Brackish dataset is employed for fish detection. UIQM and UCIQE, image enhancement assessment metrics are used to measure quality of enhanced images and found more than 20% better result for both the datasets. The proposed real-time underwater object detection model outperformed single-stage object detectors like YOLOv3, YOLOv4, YOLOv5, YOLOv7, and KPE-YOLOv5 by 5% in terms of mean Average Precision(mAP). Also proposed work compared with two-stage detector RCNN and found 8% better mAP than RCNN.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Applied Soft Computing
工程技术-计算机:跨学科应用
CiteScore
15.80
自引率
6.90%
发文量
874
审稿时长
10.9 months
期刊介绍:
Applied Soft Computing is an international journal promoting an integrated view of soft computing to solve real life problems.The focus is to publish the highest quality research in application and convergence of the areas of Fuzzy Logic, Neural Networks, Evolutionary Computing, Rough Sets and other similar techniques to address real world complexities.
Applied Soft Computing is a rolling publication: articles are published as soon as the editor-in-chief has accepted them. Therefore, the web site will continuously be updated with new articles and the publication time will be short.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


