{"title":"第一个配备自动仪器交换系统和微型工具包的显微外科辅助机器人。","authors":"Makoto Mihara, Hisako Hara, Kazuhito Wakana, Hirofumi Owaki, Kei Mikami, Atsushi Miyamoto, Munekazu Naito, Ken Masamune","doi":"10.1097/GOX.0000000000007072","DOIUrl":null,"url":null,"abstract":"<p><p>Microsurgery requires high precision, stability, and effective teamwork. However, current robotic-assisted surgery faces challenges such as inefficient instrument exchange and dependence on surgical assistants, contributing to prolonged operative times and increased costs. To address these issues and enhance surgical efficiency and surgeon autonomy, we developed a microsurgery-assisting robot equipped with an automated instrument exchange system and a specialized micro tool kit. The robot was tested using chicken-wing arteries and rat vessels with diameters ranging from 0.35 to 0.8 mm. Evaluation parameters included anastomosis time, frequency of instrument exchanges, and vascular patency rates. The automated system completed instrument exchanges accurately within approximately 9 seconds, maintaining a smooth workflow while significantly reducing reliance on assistants. In the rat model, a vascular patency rate of 100% was achieved. Although anastomosis times were slightly longer compared with manual operations performed by skilled surgeons, our system is anticipated to improve accuracy in complex microsurgical procedures involving extremely fine vessels. Conventional microsurgery-assisting robots have primarily focused on performing vascular anastomosis alone; however, our newly developed robot with an automated instrument exchange mechanism effectively facilitates a broader range of tasks, including vessel dissection, trimming, vascular anastomosis, and postoperative patency assessments.</p>","PeriodicalId":20149,"journal":{"name":"Plastic and Reconstructive Surgery Global Open","volume":"13 9","pages":"e7072"},"PeriodicalIF":1.8000,"publicationDate":"2025-09-10","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12422773/pdf/","citationCount":"0","resultStr":"{\"title\":\"The First Microsurgery-assisting Robot Equipped With an Automatic Instrument Exchange System and a Miniature Tool Kit.\",\"authors\":\"Makoto Mihara, Hisako Hara, Kazuhito Wakana, Hirofumi Owaki, Kei Mikami, Atsushi Miyamoto, Munekazu Naito, Ken Masamune\",\"doi\":\"10.1097/GOX.0000000000007072\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Microsurgery requires high precision, stability, and effective teamwork. However, current robotic-assisted surgery faces challenges such as inefficient instrument exchange and dependence on surgical assistants, contributing to prolonged operative times and increased costs. To address these issues and enhance surgical efficiency and surgeon autonomy, we developed a microsurgery-assisting robot equipped with an automated instrument exchange system and a specialized micro tool kit. The robot was tested using chicken-wing arteries and rat vessels with diameters ranging from 0.35 to 0.8 mm. Evaluation parameters included anastomosis time, frequency of instrument exchanges, and vascular patency rates. The automated system completed instrument exchanges accurately within approximately 9 seconds, maintaining a smooth workflow while significantly reducing reliance on assistants. In the rat model, a vascular patency rate of 100% was achieved. Although anastomosis times were slightly longer compared with manual operations performed by skilled surgeons, our system is anticipated to improve accuracy in complex microsurgical procedures involving extremely fine vessels. Conventional microsurgery-assisting robots have primarily focused on performing vascular anastomosis alone; however, our newly developed robot with an automated instrument exchange mechanism effectively facilitates a broader range of tasks, including vessel dissection, trimming, vascular anastomosis, and postoperative patency assessments.</p>\",\"PeriodicalId\":20149,\"journal\":{\"name\":\"Plastic and Reconstructive Surgery Global Open\",\"volume\":\"13 9\",\"pages\":\"e7072\"},\"PeriodicalIF\":1.8000,\"publicationDate\":\"2025-09-10\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12422773/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Plastic and Reconstructive Surgery Global Open\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1097/GOX.0000000000007072\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/9/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"SURGERY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Plastic and Reconstructive Surgery Global Open","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1097/GOX.0000000000007072","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/9/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"SURGERY","Score":null,"Total":0}
The First Microsurgery-assisting Robot Equipped With an Automatic Instrument Exchange System and a Miniature Tool Kit.
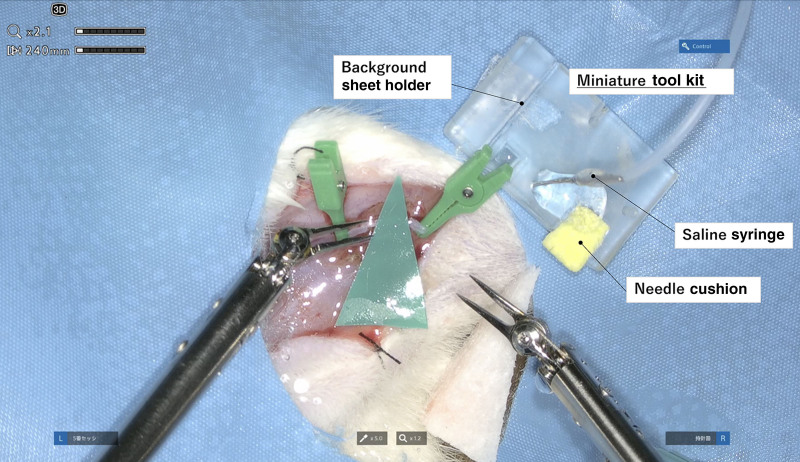
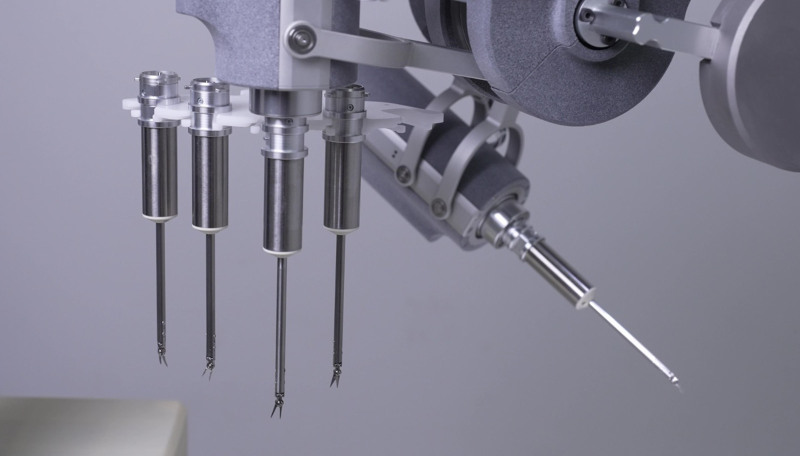
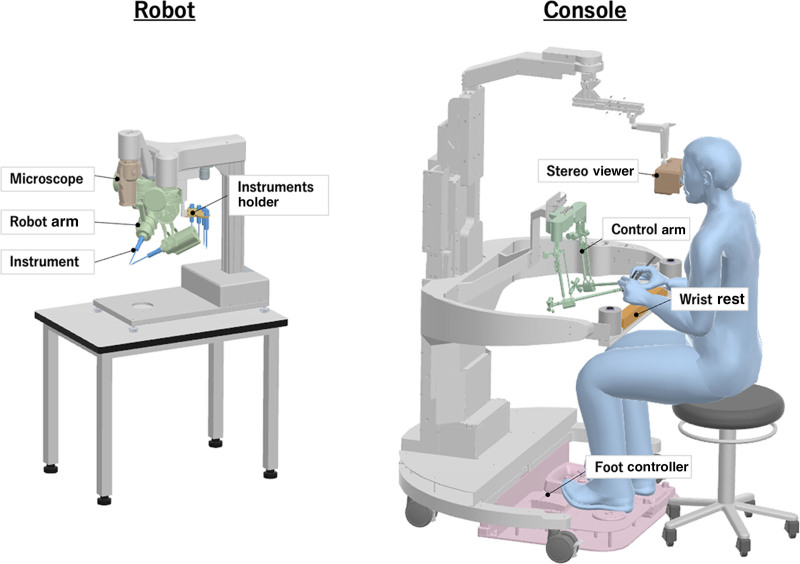
Microsurgery requires high precision, stability, and effective teamwork. However, current robotic-assisted surgery faces challenges such as inefficient instrument exchange and dependence on surgical assistants, contributing to prolonged operative times and increased costs. To address these issues and enhance surgical efficiency and surgeon autonomy, we developed a microsurgery-assisting robot equipped with an automated instrument exchange system and a specialized micro tool kit. The robot was tested using chicken-wing arteries and rat vessels with diameters ranging from 0.35 to 0.8 mm. Evaluation parameters included anastomosis time, frequency of instrument exchanges, and vascular patency rates. The automated system completed instrument exchanges accurately within approximately 9 seconds, maintaining a smooth workflow while significantly reducing reliance on assistants. In the rat model, a vascular patency rate of 100% was achieved. Although anastomosis times were slightly longer compared with manual operations performed by skilled surgeons, our system is anticipated to improve accuracy in complex microsurgical procedures involving extremely fine vessels. Conventional microsurgery-assisting robots have primarily focused on performing vascular anastomosis alone; however, our newly developed robot with an automated instrument exchange mechanism effectively facilitates a broader range of tasks, including vessel dissection, trimming, vascular anastomosis, and postoperative patency assessments.
期刊介绍:
Plastic and Reconstructive Surgery—Global Open is an open access, peer reviewed, international journal focusing on global plastic and reconstructive surgery.Plastic and Reconstructive Surgery—Global Open publishes on all areas of plastic and reconstructive surgery, including basic science/experimental studies pertinent to the field and also clinical articles on such topics as: breast reconstruction, head and neck surgery, pediatric and craniofacial surgery, hand and microsurgery, wound healing, and cosmetic and aesthetic surgery. Clinical studies, experimental articles, ideas and innovations, and techniques and case reports are all welcome article types. Manuscript submission is open to all surgeons, researchers, and other health care providers world-wide who wish to communicate their research results on topics related to plastic and reconstructive surgery. Furthermore, Plastic and Reconstructive Surgery—Global Open, a complimentary journal to Plastic and Reconstructive Surgery, provides an open access venue for the publication of those research studies sponsored by private and public funding agencies that require open access publication of study results. Its mission is to disseminate high quality, peer reviewed research in plastic and reconstructive surgery to the widest possible global audience, through an open access platform. As an open access journal, Plastic and Reconstructive Surgery—Global Open offers its content for free to any viewer. Authors of articles retain their copyright to the materials published. Additionally, Plastic and Reconstructive Surgery—Global Open provides rapid review and publication of accepted papers.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


