Weizhen Tang, Jie Dai, Zhousheng Huang, Boyang Hao, Weizheng Xie
{"title":"基于知识蒸馏技术的四维轨迹轻量化预测算法。","authors":"Weizhen Tang, Jie Dai, Zhousheng Huang, Boyang Hao, Weizheng Xie","doi":"10.3389/fnbot.2025.1643919","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>To address the challenges of current 4D trajectory prediction-specifically, limited multi-factor feature extraction and excessive computational cost-this study develops a lightweight prediction framework tailored for real-time air-traffic management.</p><p><strong>Methods: </strong>We propose a hybrid RCBAM-TCN-LSTM architecture enhanced with a teacher-student knowledge distillation mechanism. The Residual Convolutional Block Attention Module (RCBAM) serves as the teacher network to extract high-dimensional spatial features via residual structures and channel-spatial attention. The student network adopts a Temporal Convolutional Network-LSTM (TCN-LSTM) design, integrating dilated causal convolutions and two LSTM layers for efficient temporal modeling. Historical ADS-B trajectory data from Zhuhai Jinwan Airport are preprocessed using cubic spline interpolation and a uniform-step sliding window to ensure data alignment and temporal consistency. In the distillation process, soft labels from the teacher and hard labels from actual observations jointly guide student training.</p><p><strong>Results: </strong>In multi-step prediction experiments, the distilled RCBAM-TCN-LSTM model achieved average reductions of 40%-60% in MAE, RMSE, and MAPE compared with the original RCBAM and TCN-LSTM models, while improving <i>R</i> <sup>²</sup> by 4%-6%. The approach maintained high accuracy across different prediction horizons while reducing computational complexity.</p><p><strong>Discussion: </strong>The proposed method effectively balances high-precision modeling of spatiotemporal dependencies with lightweight deployment requirements, enabling real-time air-traffic monitoring and early warning on standard CPUs and embedded devices. This framework offers a scalable solution for enhancing the operational safety and efficiency of modern air-traffic control systems.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1643919"},"PeriodicalIF":2.8000,"publicationDate":"2025-08-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12411499/pdf/","citationCount":"0","resultStr":"{\"title\":\"4D trajectory lightweight prediction algorithm based on knowledge distillation technique.\",\"authors\":\"Weizhen Tang, Jie Dai, Zhousheng Huang, Boyang Hao, Weizheng Xie\",\"doi\":\"10.3389/fnbot.2025.1643919\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>To address the challenges of current 4D trajectory prediction-specifically, limited multi-factor feature extraction and excessive computational cost-this study develops a lightweight prediction framework tailored for real-time air-traffic management.</p><p><strong>Methods: </strong>We propose a hybrid RCBAM-TCN-LSTM architecture enhanced with a teacher-student knowledge distillation mechanism. The Residual Convolutional Block Attention Module (RCBAM) serves as the teacher network to extract high-dimensional spatial features via residual structures and channel-spatial attention. The student network adopts a Temporal Convolutional Network-LSTM (TCN-LSTM) design, integrating dilated causal convolutions and two LSTM layers for efficient temporal modeling. Historical ADS-B trajectory data from Zhuhai Jinwan Airport are preprocessed using cubic spline interpolation and a uniform-step sliding window to ensure data alignment and temporal consistency. In the distillation process, soft labels from the teacher and hard labels from actual observations jointly guide student training.</p><p><strong>Results: </strong>In multi-step prediction experiments, the distilled RCBAM-TCN-LSTM model achieved average reductions of 40%-60% in MAE, RMSE, and MAPE compared with the original RCBAM and TCN-LSTM models, while improving <i>R</i> <sup>²</sup> by 4%-6%. The approach maintained high accuracy across different prediction horizons while reducing computational complexity.</p><p><strong>Discussion: </strong>The proposed method effectively balances high-precision modeling of spatiotemporal dependencies with lightweight deployment requirements, enabling real-time air-traffic monitoring and early warning on standard CPUs and embedded devices. This framework offers a scalable solution for enhancing the operational safety and efficiency of modern air-traffic control systems.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1643919\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-08-22\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12411499/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1643919\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1643919","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
4D trajectory lightweight prediction algorithm based on knowledge distillation technique.
Introduction: To address the challenges of current 4D trajectory prediction-specifically, limited multi-factor feature extraction and excessive computational cost-this study develops a lightweight prediction framework tailored for real-time air-traffic management.
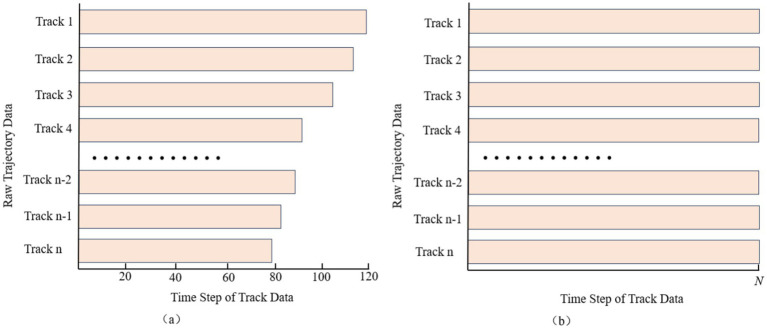
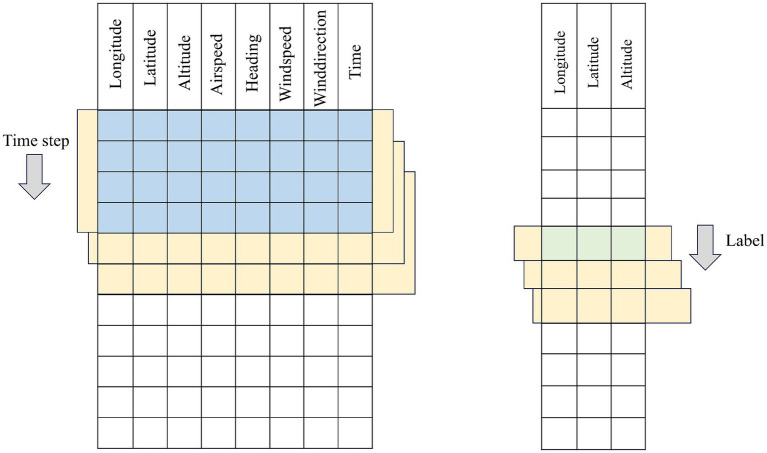
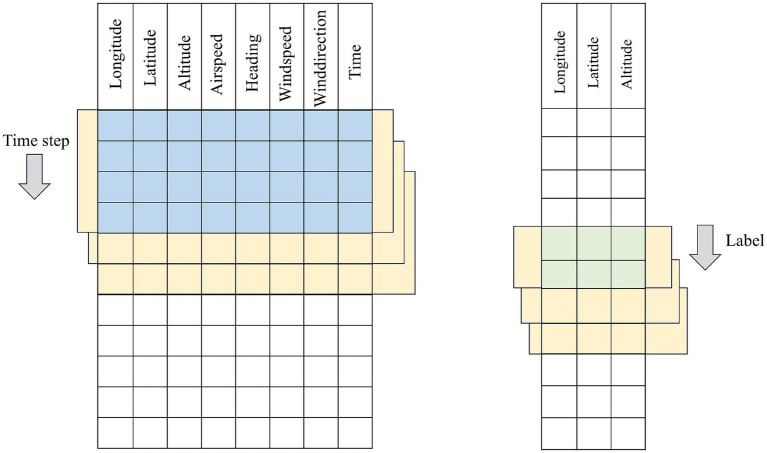
Methods: We propose a hybrid RCBAM-TCN-LSTM architecture enhanced with a teacher-student knowledge distillation mechanism. The Residual Convolutional Block Attention Module (RCBAM) serves as the teacher network to extract high-dimensional spatial features via residual structures and channel-spatial attention. The student network adopts a Temporal Convolutional Network-LSTM (TCN-LSTM) design, integrating dilated causal convolutions and two LSTM layers for efficient temporal modeling. Historical ADS-B trajectory data from Zhuhai Jinwan Airport are preprocessed using cubic spline interpolation and a uniform-step sliding window to ensure data alignment and temporal consistency. In the distillation process, soft labels from the teacher and hard labels from actual observations jointly guide student training.
Results: In multi-step prediction experiments, the distilled RCBAM-TCN-LSTM model achieved average reductions of 40%-60% in MAE, RMSE, and MAPE compared with the original RCBAM and TCN-LSTM models, while improving R² by 4%-6%. The approach maintained high accuracy across different prediction horizons while reducing computational complexity.
Discussion: The proposed method effectively balances high-precision modeling of spatiotemporal dependencies with lightweight deployment requirements, enabling real-time air-traffic monitoring and early warning on standard CPUs and embedded devices. This framework offers a scalable solution for enhancing the operational safety and efficiency of modern air-traffic control systems.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


