Daniel Bonilla Licea, Viktor Walter, Mounir Ghogho, Martin Saska
{"title":"基于光通信的多无人机系统识别:理论与实践","authors":"Daniel Bonilla Licea, Viktor Walter, Mounir Ghogho, Martin Saska","doi":"10.1007/s10514-025-10208-5","DOIUrl":null,"url":null,"abstract":"<div><p>Mutual relative localization and identification are important features for multi-unmanned aerial vehicle (UAV) systems. Camera-based communications technology, also known as optical camera communications in the literature, is a novel technology that brings a valuable solution to this task. In such a system, the UAVs are equipped with LEDs acting as beacons, and with cameras to locate the LEDs of the other UAVs. Specific blinking sequences are assigned to the LEDs of each of the UAVs to uniquely identify them. This camera-based system is immune to radio frequency electromagnetic interference and operates in global navigation satellite-denied environments. In addition, the implementation of this system is inexpensive. In this article, we study in detail the capacity of this system and its limitations. Furthermore, we show how to construct blinking sequences for UAV LEDs to improve system performance. Finally, experimental results are presented to corroborate the analytical derivations.</p></div>","PeriodicalId":55409,"journal":{"name":"Autonomous Robots","volume":"49 3","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2025-09-04","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Optical communication-based identification for multi-UAV systems: theory and practice\",\"authors\":\"Daniel Bonilla Licea, Viktor Walter, Mounir Ghogho, Martin Saska\",\"doi\":\"10.1007/s10514-025-10208-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<div><p>Mutual relative localization and identification are important features for multi-unmanned aerial vehicle (UAV) systems. Camera-based communications technology, also known as optical camera communications in the literature, is a novel technology that brings a valuable solution to this task. In such a system, the UAVs are equipped with LEDs acting as beacons, and with cameras to locate the LEDs of the other UAVs. Specific blinking sequences are assigned to the LEDs of each of the UAVs to uniquely identify them. This camera-based system is immune to radio frequency electromagnetic interference and operates in global navigation satellite-denied environments. In addition, the implementation of this system is inexpensive. In this article, we study in detail the capacity of this system and its limitations. Furthermore, we show how to construct blinking sequences for UAV LEDs to improve system performance. Finally, experimental results are presented to corroborate the analytical derivations.</p></div>\",\"PeriodicalId\":55409,\"journal\":{\"name\":\"Autonomous Robots\",\"volume\":\"49 3\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2025-09-04\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Autonomous Robots\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://link.springer.com/article/10.1007/s10514-025-10208-5\",\"RegionNum\":3,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Robots","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10514-025-10208-5","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Optical communication-based identification for multi-UAV systems: theory and practice
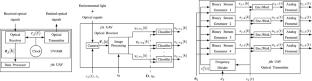
Mutual relative localization and identification are important features for multi-unmanned aerial vehicle (UAV) systems. Camera-based communications technology, also known as optical camera communications in the literature, is a novel technology that brings a valuable solution to this task. In such a system, the UAVs are equipped with LEDs acting as beacons, and with cameras to locate the LEDs of the other UAVs. Specific blinking sequences are assigned to the LEDs of each of the UAVs to uniquely identify them. This camera-based system is immune to radio frequency electromagnetic interference and operates in global navigation satellite-denied environments. In addition, the implementation of this system is inexpensive. In this article, we study in detail the capacity of this system and its limitations. Furthermore, we show how to construct blinking sequences for UAV LEDs to improve system performance. Finally, experimental results are presented to corroborate the analytical derivations.
期刊介绍:
Autonomous Robots reports on the theory and applications of robotic systems capable of some degree of self-sufficiency. It features papers that include performance data on actual robots in the real world. Coverage includes: control of autonomous robots · real-time vision · autonomous wheeled and tracked vehicles · legged vehicles · computational architectures for autonomous systems · distributed architectures for learning, control and adaptation · studies of autonomous robot systems · sensor fusion · theory of autonomous systems · terrain mapping and recognition · self-calibration and self-repair for robots · self-reproducing intelligent structures · genetic algorithms as models for robot development.
The focus is on the ability to move and be self-sufficient, not on whether the system is an imitation of biology. Of course, biological models for robotic systems are of major interest to the journal since living systems are prototypes for autonomous behavior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


