{"title":"基于对偶四元数的二维步态正逆运动学分析。","authors":"Rodolfo Vergara-Hernandez, Juan-Carlos Gonzalez-Islas, Omar-Arturo Dominguez-Ramirez, Esteban Rueda-Soriano, Ricardo Serrano-Chavez","doi":"10.3390/jfmk10030298","DOIUrl":null,"url":null,"abstract":"<p><p><b>Background:</b> Gait kinematics address the analysis of joint angles and segment movements during walking. Although there is work in the literature to solve the problems of forward (FK) and inverse kinematics (IK), there are still problems related to the accuracy of the estimation of Cartesian and joint variables, singularities, and modeling complexity on gait analysis approaches. <b>Objective:</b> In this work, we propose a framework for two-dimensional gait analysis addressing the singularities in the estimation of the joint variables using quaternion-based kinematic modeling. <b>Methods:</b> To solve the forward and inverse kinematics problems we use the dual quaternions' composition and Damped Least Square (DLS) Jacobian method, respectively. We assess the performance of the proposed methods with three gait patterns including normal, toe-walking, and heel-walking using the RMSE value in both Cartesian and joint spaces. <b>Results:</b> The main results demonstrate that the forward and inverse kinematics methods are capable of calculating the posture and the joint angles of the three-DoF kinematic chain representing a lower limb. <b>Conclusions:</b> This framework could be extended for modeling the full or partial human body as a kinematic chain with more degrees of freedom and multiple end-effectors. Finally, these methods are useful for both diagnostic disease and performance evaluation in clinical gait analysis environments.</p>","PeriodicalId":16052,"journal":{"name":"Journal of Functional Morphology and Kinesiology","volume":"10 3","pages":""},"PeriodicalIF":2.5000,"publicationDate":"2025-08-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12372157/pdf/","citationCount":"0","resultStr":"{\"title\":\"Dual Quaternion-Based Forward and Inverse Kinematics for Two-Dimensional Gait Analysis.\",\"authors\":\"Rodolfo Vergara-Hernandez, Juan-Carlos Gonzalez-Islas, Omar-Arturo Dominguez-Ramirez, Esteban Rueda-Soriano, Ricardo Serrano-Chavez\",\"doi\":\"10.3390/jfmk10030298\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p><b>Background:</b> Gait kinematics address the analysis of joint angles and segment movements during walking. Although there is work in the literature to solve the problems of forward (FK) and inverse kinematics (IK), there are still problems related to the accuracy of the estimation of Cartesian and joint variables, singularities, and modeling complexity on gait analysis approaches. <b>Objective:</b> In this work, we propose a framework for two-dimensional gait analysis addressing the singularities in the estimation of the joint variables using quaternion-based kinematic modeling. <b>Methods:</b> To solve the forward and inverse kinematics problems we use the dual quaternions' composition and Damped Least Square (DLS) Jacobian method, respectively. We assess the performance of the proposed methods with three gait patterns including normal, toe-walking, and heel-walking using the RMSE value in both Cartesian and joint spaces. <b>Results:</b> The main results demonstrate that the forward and inverse kinematics methods are capable of calculating the posture and the joint angles of the three-DoF kinematic chain representing a lower limb. <b>Conclusions:</b> This framework could be extended for modeling the full or partial human body as a kinematic chain with more degrees of freedom and multiple end-effectors. Finally, these methods are useful for both diagnostic disease and performance evaluation in clinical gait analysis environments.</p>\",\"PeriodicalId\":16052,\"journal\":{\"name\":\"Journal of Functional Morphology and Kinesiology\",\"volume\":\"10 3\",\"pages\":\"\"},\"PeriodicalIF\":2.5000,\"publicationDate\":\"2025-08-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12372157/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Journal of Functional Morphology and Kinesiology\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.3390/jfmk10030298\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"SPORT SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of Functional Morphology and Kinesiology","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3390/jfmk10030298","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"SPORT SCIENCES","Score":null,"Total":0}
Dual Quaternion-Based Forward and Inverse Kinematics for Two-Dimensional Gait Analysis.
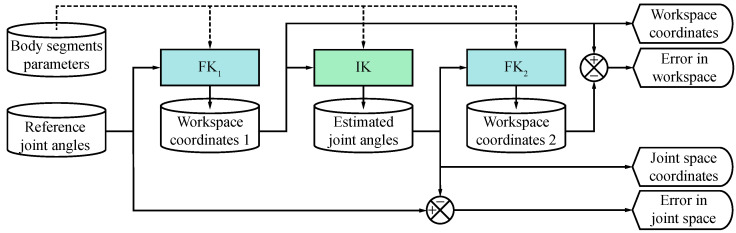
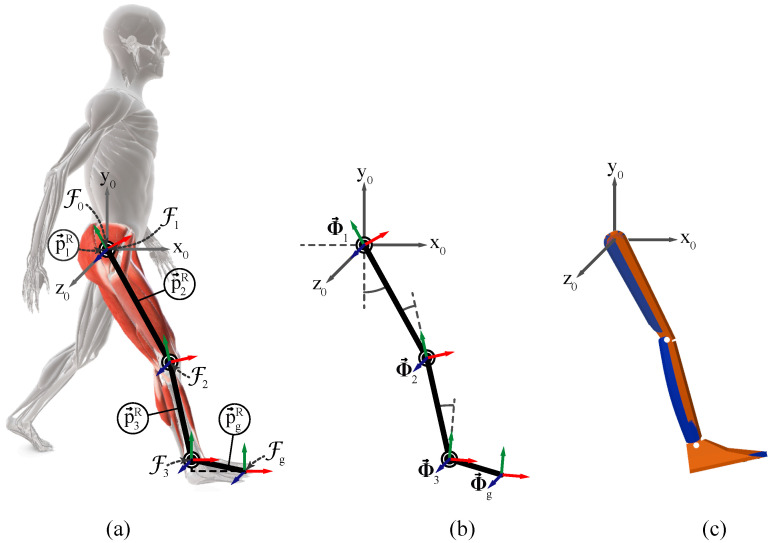
Background: Gait kinematics address the analysis of joint angles and segment movements during walking. Although there is work in the literature to solve the problems of forward (FK) and inverse kinematics (IK), there are still problems related to the accuracy of the estimation of Cartesian and joint variables, singularities, and modeling complexity on gait analysis approaches. Objective: In this work, we propose a framework for two-dimensional gait analysis addressing the singularities in the estimation of the joint variables using quaternion-based kinematic modeling. Methods: To solve the forward and inverse kinematics problems we use the dual quaternions' composition and Damped Least Square (DLS) Jacobian method, respectively. We assess the performance of the proposed methods with three gait patterns including normal, toe-walking, and heel-walking using the RMSE value in both Cartesian and joint spaces. Results: The main results demonstrate that the forward and inverse kinematics methods are capable of calculating the posture and the joint angles of the three-DoF kinematic chain representing a lower limb. Conclusions: This framework could be extended for modeling the full or partial human body as a kinematic chain with more degrees of freedom and multiple end-effectors. Finally, these methods are useful for both diagnostic disease and performance evaluation in clinical gait analysis environments.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


