扑翼机器人采用可重构机构,实现了鸟式自起飞
IF 12.5
1区 综合性期刊
Q1 MULTIDISCIPLINARY SCIENCES
引用次数: 0
摘要
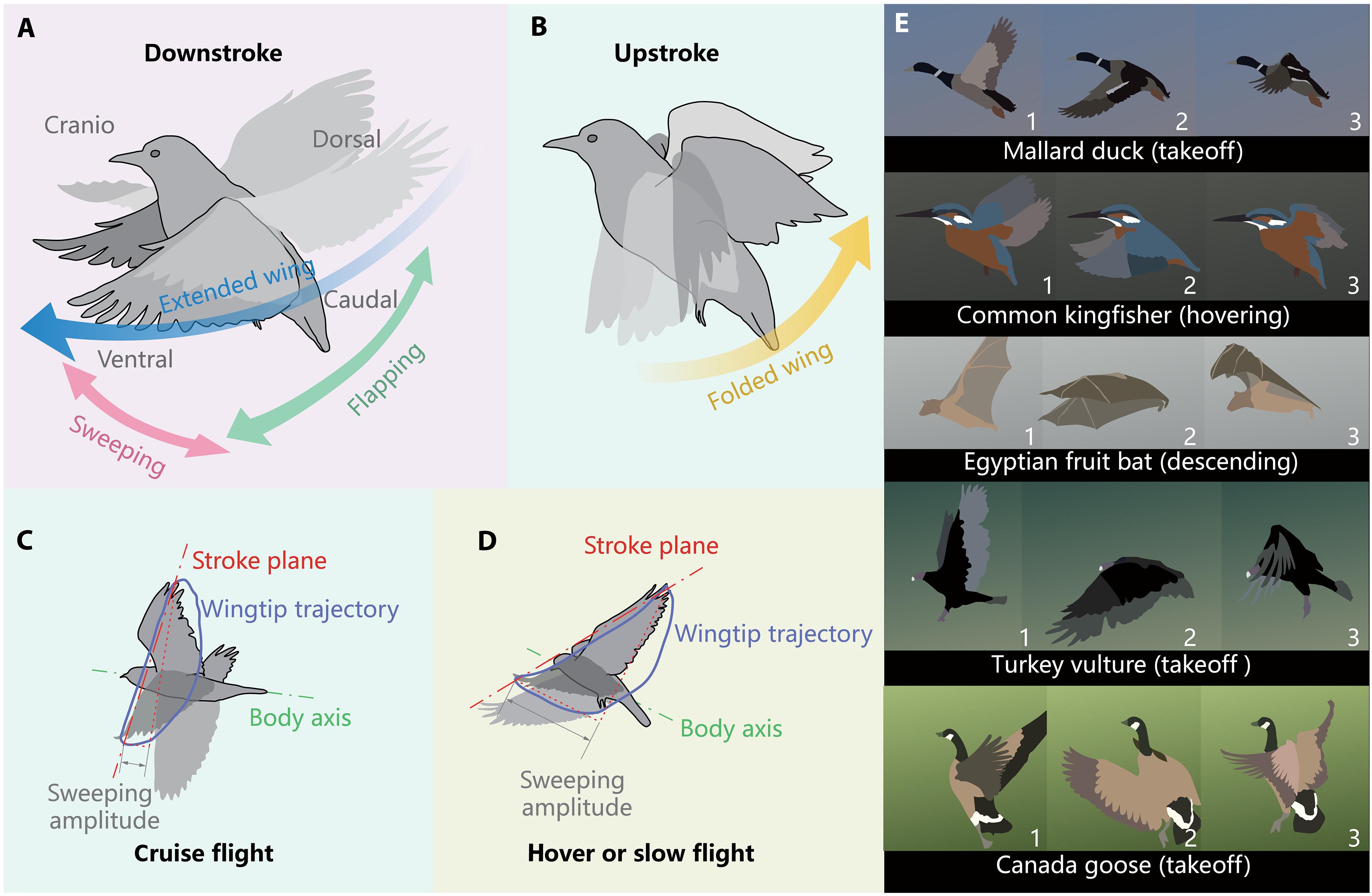
飞行的脊椎动物在悬停、起飞和着陆时使用特殊的翼拍运动学,具有腹前向下划动和非空气动力学上划动的特点,以增强低空速时的空气动力学特性。很少在机器人技术中实现,这启发了RoboFalcon2.0,一个具有可重构机制的扑翼机器人,执行生物启发的襟翼-掠折叠(FSF)运动,以控制鸟式起飞。FSF将拍动、扫掠和折叠结合在一起,模拟脊椎动物的慢速飞行运动学。风洞试验表明,横掠幅值可调节FSF运动中的升力和俯仰力矩。计算流体力学模拟表明,FSF的气动效应与前缘涡强度和压力中心位置有关。动力学仿真分析了起飞过程中的俯仰控制。真实飞行验证了RoboFalcon2.0的自起飞能力。这项工作通过类似脊椎动物的驱动原理推进了受鸟类启发的机器人技术,使更多的仿生扑翼设计成为可能。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Flapping-wing robot achieves bird-style self-takeoff by adopting reconfigurable mechanisms
Flying vertebrates use specialized wingbeat kinematics in hovering, takeoff, and landing, featuring ventrally anterior downstrokes and aerodynamically inactive upstrokes to enhance aerodynamic characteristics at low airspeeds. Rarely implemented in robotics, this inspired RoboFalcon2.0, a flapping-wing robot with reconfigurable mechanisms performing bioinspired flap-sweep-fold (FSF) motion for controlled bird-style takeoff. FSF couples flapping, sweeping, and folding within a single wingbeat cycle, mimicking vertebrate slow-flight kinematics. Wind tunnel tests demonstrate that sweeping amplitude modulates lift and pitching moment in FSF motion. Computational fluid dynamics simulations reveal that FSF’s aerodynamic effects correlate with leading-edge vortex strength and pressure center location. Dynamics simulations analyze pitch control during takeoff. Real-world flights validate RoboFalcon2.0’s self-takeoff capability. This work advances avian-inspired robotics through vertebrate-like actuation principles, enabling more biomimetic flapping-wing designs.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Science Advances
综合性期刊-综合性期刊
CiteScore
21.40
自引率
1.50%
发文量
1937
审稿时长
29 weeks
期刊介绍:
Science Advances, an open-access journal by AAAS, publishes impactful research in diverse scientific areas. It aims for fair, fast, and expert peer review, providing freely accessible research to readers. Led by distinguished scientists, the journal supports AAAS's mission by extending Science magazine's capacity to identify and promote significant advances. Evolving digital publishing technologies play a crucial role in advancing AAAS's global mission for science communication and benefitting humankind.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


