电动汽车动力学的辅助增强神经网络:改进轮滑时的轮胎力和状态估计
IF 4.6
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
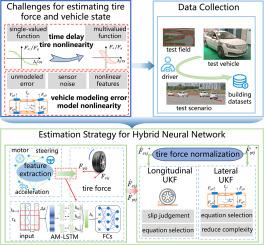
准确感知车辆状态和轮胎受力对于先进的车辆安全和控制技术至关重要。然而,由于车辆和轮胎的高度复杂和非线性特性,提取这些状态仍然是一个重大挑战。本文介绍了一种将长短期记忆(LSTM)神经网络与车辆动力学相结合的新方法来解决这些挑战。利用真实车辆数据,该研究开发了一个注意力增强的LSTM网络来估计轮胎受力。该体系结构采用了注意机制(AM)来加强相关特征提取,并采用贝叶斯优化进行超参数调整,有效地将传感器信号映射到轮胎受力。解耦的双无气味卡尔曼滤波(UKF)也被用于估计横向和纵向速度。它结合了归一化的轮胎力,由神经网络估计,作为观察,以提高UKF的收敛性和准确性,提供一个全面的车辆速度估计。最后,通过DLC和回转实验验证了算法的性能。在此条件下,与其他方法相比,该方法将轮胎纵向和横向受力的均方根误差分别降低了60.63%和44.26%。纵向速度和横向速度的RMSE分别下降了41.31%、50.46%、0.97%和59.22%。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Auxiliary-enhanced neural networks for electric vehicle dynamics: Advancing tire force and state estimation during wheel slip
Accurately perceiving vehicle states and tire forces is crucial for the advanced safety and control technologies in vehicles. However, due to the highly complex and nonlinear characteristics of both vehicles and tires, extracting these states remains a significant challenge. This paper introduces a novel approach that combines Long Short-Term Memory (LSTM) neural networks with vehicle dynamics to address these challenges. Using real vehicle data, the study develops an attention-enhanced LSTM network to estimate tire forces. The architecture incorporates an attention mechanism (AM) to strengthen relevant feature extraction, with Bayesian optimization employed for hyperparameter tuning to effectively map sensor signals to tire forces. . A decoupled dual Unscented Kalman Filter (UKF) is also employed to estimate lateral and longitudinal velocities. It incorporates normalized tire forces, estimated by a neural network, as observations to enhance the convergence and accuracy of the UKF, providing a comprehensive vehicle velocity estimate. Finally, the performance of the algorithm was validated through DLC and slalom experiments. Under these conditions, the proposed method reduced the RMSE of the estimated longitudinal and lateral tire forces by up to 60.63% and 44.26%, respectively, compared to other methods. Additionally, RMSE of the estimated longitudinal and lateral velocity decreased by 41.31%, 50.46%, 0.97%, and 59.22%, respectively.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Control Engineering Practice
工程技术-工程:电子与电气
CiteScore
9.20
自引率
12.20%
发文量
183
审稿时长
44 days
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


