多个平流层飞艇的覆盖控制与全球连接维护
IF 4.6
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
平流层飞艇编队部署时,为通信服务和地球观测提供灵活和广泛的覆盖范围。然而,在分散运动时,有限的通信范围可能导致网络中断。本文提出了一种分层制导算法,用于解决多个平流层飞艇的覆盖部署、连通性维护和迎风站保持问题。拟议的制导修改了标称部署位置,使其非常适合欠驱动系统和站保持场景。引入了一种新的离散分布估计量来估计代数连通性。在此基础上,提出了一种基于控制障碍函数的运动控制策略,以实现推力限制下的纵向速度和偏航的精确控制。大量的模拟验证了该框架在将连通性保持在预定义阈值附近、优化覆盖范围和确保稳定的地层行为方面的有效性。该方法的性能优于基线,并显示出在面临类似约束和环境干扰的欠驱动平台(如无人水面车辆和自主地面车辆)中更广泛应用的强大潜力。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Coverage control with global connectivity maintenance for multiple stratospheric airships
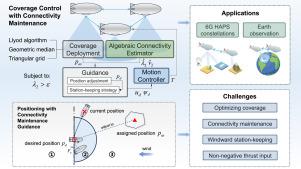
Stratospheric airships offer flexible and extensive coverage for the communication service and earth observation when deployed in formations. However, limited communication ranges may lead to network disconnection during dispersed movements. This paper presents a hierarchical guidance algorithm addressing coverage deployment, connectivity maintenance, and windward station-keeping for multiple stratospheric airships. The proposed guidance modifies nominal deployed positions, making it well-suited for underactuated systems and station-keeping scenarios. A novel discrete distributed estimator is introduced to evaluate algebraic connectivity. Furthermore, a motion control strategy based on Control Barrier Functions is developed for precise longitudinal velocity and yaw control under thrust limitation. Extensive simulations validate the framework’s effectiveness in maintaining connectivity near a predefined threshold, optimizing coverage, and ensuring stable formation behavior. The approach outperforms the baselines and demonstrates strong potential for broader application to underactuated platforms such as unmanned surface vehicles and autonomous ground vehicles, which face similar constraints and environmental disturbances.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Control Engineering Practice
工程技术-工程:电子与电气
CiteScore
9.20
自引率
12.20%
发文量
183
审稿时长
44 days
期刊介绍:
Control Engineering Practice strives to meet the needs of industrial practitioners and industrially related academics and researchers. It publishes papers which illustrate the direct application of control theory and its supporting tools in all possible areas of automation. As a result, the journal only contains papers which can be considered to have made significant contributions to the application of advanced control techniques. It is normally expected that practical results should be included, but where simulation only studies are available, it is necessary to demonstrate that the simulation model is representative of a genuine application. Strictly theoretical papers will find a more appropriate home in Control Engineering Practice''s sister publication, Automatica. It is also expected that papers are innovative with respect to the state of the art and are sufficiently detailed for a reader to be able to duplicate the main results of the paper (supplementary material, including datasets, tables, code and any relevant interactive material can be made available and downloaded from the website). The benefits of the presented methods must be made very clear and the new techniques must be compared and contrasted with results obtained using existing methods. Moreover, a thorough analysis of failures that may happen in the design process and implementation can also be part of the paper.
The scope of Control Engineering Practice matches the activities of IFAC.
Papers demonstrating the contribution of automation and control in improving the performance, quality, productivity, sustainability, resource and energy efficiency, and the manageability of systems and processes for the benefit of mankind and are relevant to industrial practitioners are most welcome.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


