基于果蔬花梗形态特征的三维点云6D位姿估计
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
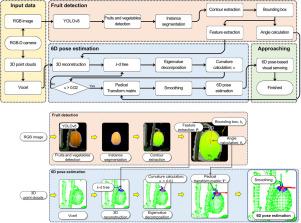
本研究提出了一种利用果蔬形态特征估计花梗6D位姿的方法。花梗是连接果实和茎的关键元素,对农业收获机器人的精度和效率有重要影响。该系统采用从RGB-D相机获得的3D点云数据,利用宽度和曲率的差异来识别花梗的位置和方向。采用轻量级的YOLOv8n-seg结构检测水果和蔬菜,计算局部曲率来估计花梗位置。通过对番茄和甜瓜(C. melo)的实验评估,证明了该系统对不同农业环境的处理能力。对于甜瓜,系统的准确率为0.927,召回率为0.809,f1得分为0.864。对于西红柿,准确率和召回率均为0.837,f1得分为0.837。甜瓜在x、y和z轴上的平均位置误差分别为1.34、3.19和4.79 mm,均方根误差分别为7.95、5.46和5.13 mm。对于φ, θ和ψ,取向误差平均分别为2.14°,1.14°和-1.49°。平滑算法,包括平移线性插值和旋转球面线性插值,解决了位置和方向的不稳定性,进一步提高了轨迹精度。该系统实现了实时运行,处理速度超过20fps(平滑),适用于动态农业任务。结果突出了该系统在准确识别和接近花梗方面的鲁棒性,即使在闭塞或聚集的条件下也是如此。本文章由计算机程序翻译,如有差异,请以英文原文为准。
3D point cloud-based 6D pose estimation using the pedicel morphological features of fruits and vegetables
This study proposes a method to estimate the 6D pose of pedicels using the morphological features of fruits and vegetables. The pedicel, a critical element connecting fruits to their stems, significantly influences the precision and efficiency of agricultural harvesting robots. The proposed system employs 3D point cloud data obtained from RGB-D cameras, using differences in width and curvature to identify the location and orientation of the pedicel. A lightweight YOLOv8n-seg architecture is employed to detect fruits and vegetables, computing the local curvature to estimate pedicel positions. The experimental evaluations on tomatoes and Cucumis melo (C. melo) demonstrate the capability of the proposed system to handle diverse agricultural environments. For C. melo, the system achieved a precision of 0.927, recall of 0.809 and F1-score of 0.864. For tomatoes, precision and recall were both 0.837, resulting in an F1-score of 0.837. Positional errors along the -, - and -axes averaged 1.34, 3.19 and 4.79 mm , respectively, for the C. melo, with corresponding root mean squared errors of 7.95, 5.46 and 5.13 mm. Orientational errors averaged 2.14°, 1.14°and -1.49°for , and , respectively. Smoothing algorithms, including linear interpolation for translation and spherical linear interpolation for rotation, address positional and orientational instability, further enhancing trajectory precision. The system achieved real-time operation with a processing speed exceeding 20 fps with smoothing, making it suitable for dynamic agricultural tasks. The results highlight the robust performance of the system in accurately identifying and approaching pedicels, even in occluded or clustered conditions.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


