Sayeed Shafayet Chowdhury, Deepika Sharma, Adarsh Kosta, Kaushik Roy
{"title":"机器人视觉的神经形态计算:算法到硬件的进步。","authors":"Sayeed Shafayet Chowdhury, Deepika Sharma, Adarsh Kosta, Kaushik Roy","doi":"10.1038/s44172-025-00492-5","DOIUrl":null,"url":null,"abstract":"<p><p>Neuromorphic computing offers transformative potential for AI in resource-constrained environments by mimicking biological neural efficiency. This perspective article analyzes recent advances and future directions, advocating a system design approach that integrates specialized sensing (e.g., event-based cameras), brain-inspired algorithms (SNNs and SNN-ANN hybrids), and dedicated neuromorphic hardware. Using vision-based drone navigation (VDN) as an exemplar-drawing parallels with biological systems like Drosophila-we demonstrate how these components enable event-driven processing and overcome von Neumann architecture limitations through near-/in-memory computing. Key challenges include large-scale integration, benchmarking standardization, and algorithm-hardware co-design for emerging applications, which we discuss alongside current and future research directions.</p>","PeriodicalId":72644,"journal":{"name":"Communications engineering","volume":"4 1","pages":"152"},"PeriodicalIF":0.0000,"publicationDate":"2025-08-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12350809/pdf/","citationCount":"0","resultStr":"{\"title\":\"Neuromorphic computing for robotic vision: algorithms to hardware advances.\",\"authors\":\"Sayeed Shafayet Chowdhury, Deepika Sharma, Adarsh Kosta, Kaushik Roy\",\"doi\":\"10.1038/s44172-025-00492-5\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Neuromorphic computing offers transformative potential for AI in resource-constrained environments by mimicking biological neural efficiency. This perspective article analyzes recent advances and future directions, advocating a system design approach that integrates specialized sensing (e.g., event-based cameras), brain-inspired algorithms (SNNs and SNN-ANN hybrids), and dedicated neuromorphic hardware. Using vision-based drone navigation (VDN) as an exemplar-drawing parallels with biological systems like Drosophila-we demonstrate how these components enable event-driven processing and overcome von Neumann architecture limitations through near-/in-memory computing. Key challenges include large-scale integration, benchmarking standardization, and algorithm-hardware co-design for emerging applications, which we discuss alongside current and future research directions.</p>\",\"PeriodicalId\":72644,\"journal\":{\"name\":\"Communications engineering\",\"volume\":\"4 1\",\"pages\":\"152\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2025-08-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12350809/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Communications engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1038/s44172-025-00492-5\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Communications engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1038/s44172-025-00492-5","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Neuromorphic computing for robotic vision: algorithms to hardware advances.
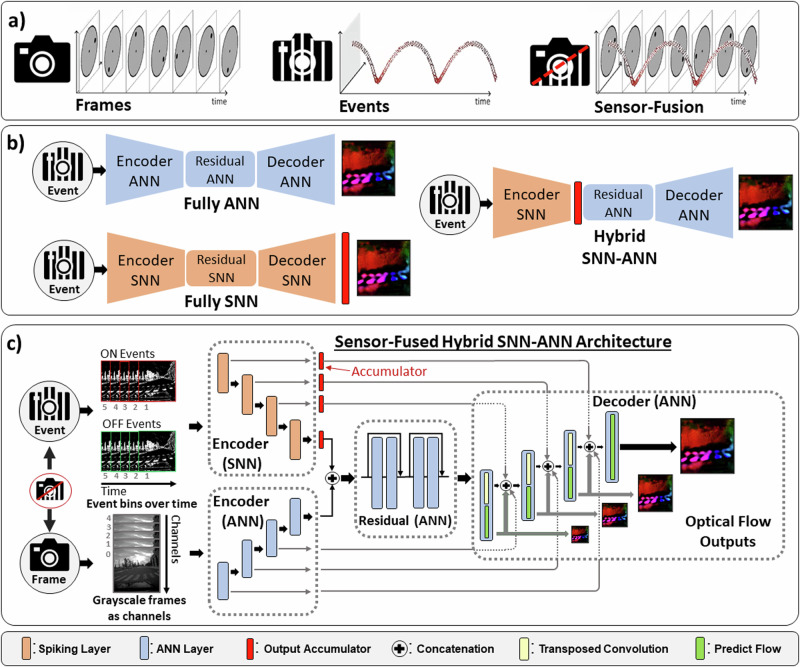
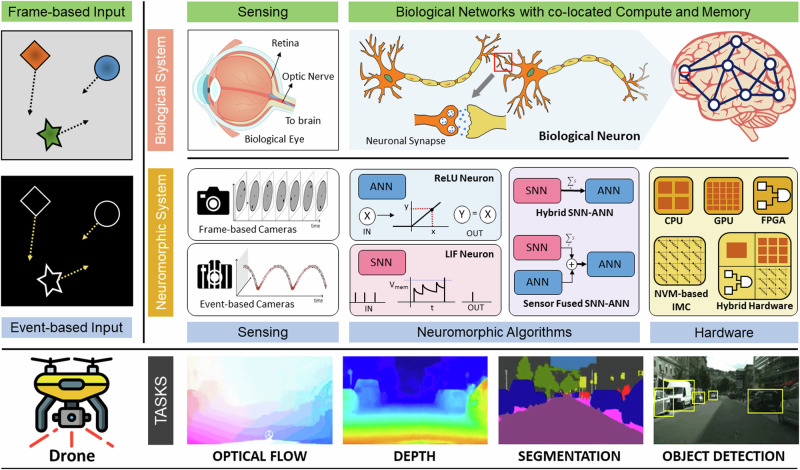
Neuromorphic computing offers transformative potential for AI in resource-constrained environments by mimicking biological neural efficiency. This perspective article analyzes recent advances and future directions, advocating a system design approach that integrates specialized sensing (e.g., event-based cameras), brain-inspired algorithms (SNNs and SNN-ANN hybrids), and dedicated neuromorphic hardware. Using vision-based drone navigation (VDN) as an exemplar-drawing parallels with biological systems like Drosophila-we demonstrate how these components enable event-driven processing and overcome von Neumann architecture limitations through near-/in-memory computing. Key challenges include large-scale integration, benchmarking standardization, and algorithm-hardware co-design for emerging applications, which we discuss alongside current and future research directions.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


