基于集合初始激励的无人机网络分布式自适应避障覆盖控制
IF 5.2
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
引用次数: 0
摘要
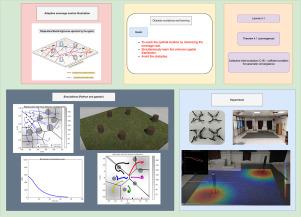
本文介绍了一种针对移动传感器网络(MSN)覆盖的分布式自适应控制器,该控制器在保证避障的同时结合了集体初始激励(C-IE)。智能体与其邻居交换参数估计,以促进对未知感官功能的共识。它们共同达到C-IE条件,使参数收敛,避免了每个agent单独满足激励条件的需要。这种C-IE条件将先前建立的初始激励(IE)条件扩展到多智能体系统。提出的人工类势控制律和参数自适应既能保证避障和覆盖,又能保证参数估计。多架无人机的实验验证了该方法的有效性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Distributed adaptive coverage control with obstacle avoidance for a drone network based on collective initial excitation
This paper introduces a distributed adaptive controller for mobile sensor network (MSN) coverage that incorporates collective initial excitation (C-IE) while simultaneously ensuring obstacle avoidance. Agents exchange their parameter estimates with their neighbors to facilitate consensus on the unknown sensory function. They collectively achieve the C-IE condition, which enables parameter convergence and obviates the need for every agent to individually satisfy the excitation condition. This C-IE condition extends the previously established initial excitation (IE) condition to multi-agent systems. The proposed artificial potential-like control law and parameter adaptation guarantee both obstacle avoidance and coverage, along with parameter estimation. Experimental tests with multiple drones validate the effectiveness of the proposed method.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Robotics and Autonomous Systems
工程技术-机器人学
CiteScore
9.00
自引率
7.00%
发文量
164
审稿时长
4.5 months
期刊介绍:
Robotics and Autonomous Systems will carry articles describing fundamental developments in the field of robotics, with special emphasis on autonomous systems. An important goal of this journal is to extend the state of the art in both symbolic and sensory based robot control and learning in the context of autonomous systems.
Robotics and Autonomous Systems will carry articles on the theoretical, computational and experimental aspects of autonomous systems, or modules of such systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


