Hui Wang, Adit Gupta, Qiuchun Lu, Wenting Wu, Xueyang Wang, Xin Huang, Xuanyi Hu, Pooi See Lee
{"title":"用于介电弹性体致动器的超软、快速自愈聚离子液体电极","authors":"Hui Wang, Adit Gupta, Qiuchun Lu, Wenting Wu, Xueyang Wang, Xin Huang, Xuanyi Hu, Pooi See Lee","doi":"10.1038/s41467-025-62796-6","DOIUrl":null,"url":null,"abstract":"<p>Dielectric elastomer actuators (DEAs) exhibit large actuation strains, lightweight, and fast response, making them a promising candidate for soft robotics and soft grippers. Ionogels have been used as the electrodes in DEAs to offer thermostability and self-healability, however, typically the elastic modulus of the self-healing ionogel electrodes is of several tens of kPa (or higher), limiting the actuation strain performance and self-healing speed of the DEA. In this work, a poly(ionic liquid) (PIL) electrode with an ultralow elastic modulus of 3.4 kPa and rapid self-healing within 10 s in ambient and underwater conditions is achieved through ionic interaction regulation. The resultant DEAs realized an area strain of 63.2%, and maintained the strains after 10 s of self-healing at room temperature, outperforming other reported DEAs with self-healing electrodes. With the PIL electrode, a soft gripper composed of two bending DEAs is fabricated to gently handle soft and delicate objects in both air and underwater settings, retaining functionality even after damages due to self-healing of the PIL electrodes. The PIL electrode advances the development of electrically driven soft robotics for exploration in harsh environment or underwater settings.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"36 1","pages":""},"PeriodicalIF":15.7000,"publicationDate":"2025-08-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Ultrasoft and fast self-healing poly(ionic liquid) electrode for dielectric elastomer actuators\",\"authors\":\"Hui Wang, Adit Gupta, Qiuchun Lu, Wenting Wu, Xueyang Wang, Xin Huang, Xuanyi Hu, Pooi See Lee\",\"doi\":\"10.1038/s41467-025-62796-6\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Dielectric elastomer actuators (DEAs) exhibit large actuation strains, lightweight, and fast response, making them a promising candidate for soft robotics and soft grippers. Ionogels have been used as the electrodes in DEAs to offer thermostability and self-healability, however, typically the elastic modulus of the self-healing ionogel electrodes is of several tens of kPa (or higher), limiting the actuation strain performance and self-healing speed of the DEA. In this work, a poly(ionic liquid) (PIL) electrode with an ultralow elastic modulus of 3.4 kPa and rapid self-healing within 10 s in ambient and underwater conditions is achieved through ionic interaction regulation. The resultant DEAs realized an area strain of 63.2%, and maintained the strains after 10 s of self-healing at room temperature, outperforming other reported DEAs with self-healing electrodes. With the PIL electrode, a soft gripper composed of two bending DEAs is fabricated to gently handle soft and delicate objects in both air and underwater settings, retaining functionality even after damages due to self-healing of the PIL electrodes. The PIL electrode advances the development of electrically driven soft robotics for exploration in harsh environment or underwater settings.</p>\",\"PeriodicalId\":19066,\"journal\":{\"name\":\"Nature Communications\",\"volume\":\"36 1\",\"pages\":\"\"},\"PeriodicalIF\":15.7000,\"publicationDate\":\"2025-08-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Communications\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41467-025-62796-6\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-025-62796-6","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
Ultrasoft and fast self-healing poly(ionic liquid) electrode for dielectric elastomer actuators
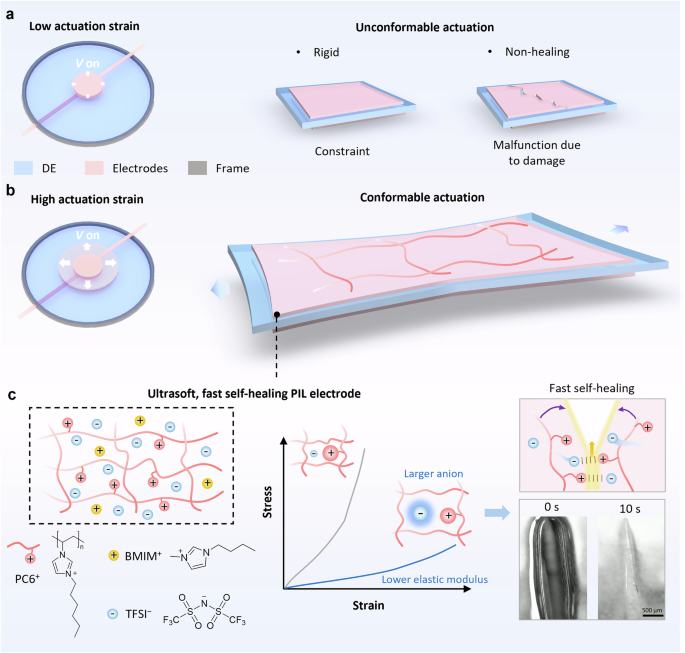
Dielectric elastomer actuators (DEAs) exhibit large actuation strains, lightweight, and fast response, making them a promising candidate for soft robotics and soft grippers. Ionogels have been used as the electrodes in DEAs to offer thermostability and self-healability, however, typically the elastic modulus of the self-healing ionogel electrodes is of several tens of kPa (or higher), limiting the actuation strain performance and self-healing speed of the DEA. In this work, a poly(ionic liquid) (PIL) electrode with an ultralow elastic modulus of 3.4 kPa and rapid self-healing within 10 s in ambient and underwater conditions is achieved through ionic interaction regulation. The resultant DEAs realized an area strain of 63.2%, and maintained the strains after 10 s of self-healing at room temperature, outperforming other reported DEAs with self-healing electrodes. With the PIL electrode, a soft gripper composed of two bending DEAs is fabricated to gently handle soft and delicate objects in both air and underwater settings, retaining functionality even after damages due to self-healing of the PIL electrodes. The PIL electrode advances the development of electrically driven soft robotics for exploration in harsh environment or underwater settings.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


