喷射式3D混凝土打印空间桁架自动化机器人装配规划
IF 11.5
1区 工程技术
Q1 CONSTRUCTION & BUILDING TECHNOLOGY
引用次数: 0
摘要
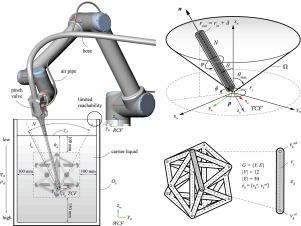
注入3D混凝土打印(I3DCP)是一种新兴的制造技术,可以在载体液体中挤压空间混凝土,减少重力影响,并允许创建复杂的空间桁架。然而,由于材料流变和机械限制,I3DCP在刀具路径规划方面提出了新的挑战。本文介绍了一种针对I3DCP的自动化规划方法,该方法将基于约束满足问题(CSP)的序列规划与笛卡尔运动规划相结合。序列规划器使用启发式局部搜索与前向检查和回溯,而运动规划器解决末端执行器冗余与运动和速度约束。通过使用固定式六轴机械臂制造3米跨距人行天桥,验证了该方法的有效性,并通过仿真在几何复杂度不断增加的多个原型上进行了测试,证明了该方法在复杂结构设计中的有效性和可扩展性。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Automated Robotic Assembly Planning of Space Trusses for Injection 3D Concrete Printing
Injection 3D Concrete Printing (I3DCP) is an emerging fabrication technique that enables spatial concrete extrusion within a carrier liquid, reducing gravitational effects and allowing the creation of complex space trusses. However, I3DCP introduces new challenges in toolpath planning due to material rheology and mechanical constraints. This paper introduces an automated planning method tailored for I3DCP, integrating a constraint satisfaction problem (CSP)-based sequence planner with a Cartesian motion planner. The sequence planner uses heuristic local search with forward checking and backtracking, while the motion planner addresses end-effector redundancy with kinematic and velocity constraints. The method is validated by fabricating a 3-meter-span pedestrian bridge using a stationary 6-axis robotic arm and tested on multiple prototypes of increasing geometric complexity through simulation, demonstrating its effectiveness and scalability for intricate structural designs.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Automation in Construction
工程技术-工程:土木
CiteScore
19.20
自引率
16.50%
发文量
563
审稿时长
8.5 months
期刊介绍:
Automation in Construction is an international journal that focuses on publishing original research papers related to the use of Information Technologies in various aspects of the construction industry. The journal covers topics such as design, engineering, construction technologies, and the maintenance and management of constructed facilities.
The scope of Automation in Construction is extensive and covers all stages of the construction life cycle. This includes initial planning and design, construction of the facility, operation and maintenance, as well as the eventual dismantling and recycling of buildings and engineering structures.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


