{"title":"基于环网络的自组织分布式多机器人任务分配系统","authors":"Ji-Wook Kwon, Sung-Jo Yun, Hyogon Kim, Jungwoo Lee, Na-Hyun Lee, Young-Ho Choi, Goobong Chung","doi":"10.1049/ell2.70380","DOIUrl":null,"url":null,"abstract":"<p>This letter proposes a self-organising distributed task assignment algorithm based on a ring network for multi-robot systems. Unlike conventional multi-robot task assignment methods, the proposed approach enables task assignment through simple data exchange, without the need for a supervisor, global synchronisation and leader election. To evaluate the proposed method, simulations were conducted with seven robots and variable task durations. Results show that all tasks were successfully assigned with balanced distribution. The optimal algorithm consistently chose the robot with the lowest execution cost, demonstrating efficient allocation without centralised control.</p>","PeriodicalId":11556,"journal":{"name":"Electronics Letters","volume":"61 1","pages":""},"PeriodicalIF":0.8000,"publicationDate":"2025-08-05","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/ell2.70380","citationCount":"0","resultStr":"{\"title\":\"Self-Organising Distributed Multi-Robot Task Assignment System Based on Ring Network\",\"authors\":\"Ji-Wook Kwon, Sung-Jo Yun, Hyogon Kim, Jungwoo Lee, Na-Hyun Lee, Young-Ho Choi, Goobong Chung\",\"doi\":\"10.1049/ell2.70380\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This letter proposes a self-organising distributed task assignment algorithm based on a ring network for multi-robot systems. Unlike conventional multi-robot task assignment methods, the proposed approach enables task assignment through simple data exchange, without the need for a supervisor, global synchronisation and leader election. To evaluate the proposed method, simulations were conducted with seven robots and variable task durations. Results show that all tasks were successfully assigned with balanced distribution. The optimal algorithm consistently chose the robot with the lowest execution cost, demonstrating efficient allocation without centralised control.</p>\",\"PeriodicalId\":11556,\"journal\":{\"name\":\"Electronics Letters\",\"volume\":\"61 1\",\"pages\":\"\"},\"PeriodicalIF\":0.8000,\"publicationDate\":\"2025-08-05\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/ell2.70380\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Electronics Letters\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/ell2.70380\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Electronics Letters","FirstCategoryId":"5","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/ell2.70380","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Self-Organising Distributed Multi-Robot Task Assignment System Based on Ring Network
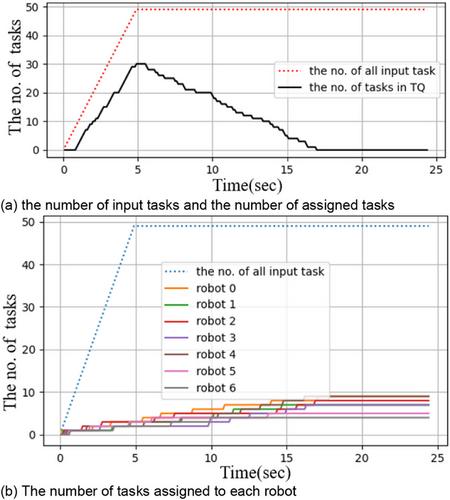
This letter proposes a self-organising distributed task assignment algorithm based on a ring network for multi-robot systems. Unlike conventional multi-robot task assignment methods, the proposed approach enables task assignment through simple data exchange, without the need for a supervisor, global synchronisation and leader election. To evaluate the proposed method, simulations were conducted with seven robots and variable task durations. Results show that all tasks were successfully assigned with balanced distribution. The optimal algorithm consistently chose the robot with the lowest execution cost, demonstrating efficient allocation without centralised control.
期刊介绍:
Electronics Letters is an internationally renowned peer-reviewed rapid-communication journal that publishes short original research papers every two weeks. Its broad and interdisciplinary scope covers the latest developments in all electronic engineering related fields including communication, biomedical, optical and device technologies. Electronics Letters also provides further insight into some of the latest developments through special features and interviews.
Scope
As a journal at the forefront of its field, Electronics Letters publishes papers covering all themes of electronic and electrical engineering. The major themes of the journal are listed below.
Antennas and Propagation
Biomedical and Bioinspired Technologies, Signal Processing and Applications
Control Engineering
Electromagnetism: Theory, Materials and Devices
Electronic Circuits and Systems
Image, Video and Vision Processing and Applications
Information, Computing and Communications
Instrumentation and Measurement
Microwave Technology
Optical Communications
Photonics and Opto-Electronics
Power Electronics, Energy and Sustainability
Radar, Sonar and Navigation
Semiconductor Technology
Signal Processing
MIMO




 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


