无系留磁性机器人用聚合物复合材料的加工-结构-性能-性能关系
IF 26.1
1区 化学
Q1 POLYMER SCIENCE
引用次数: 0
摘要
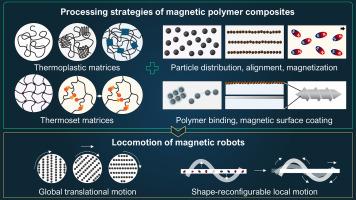
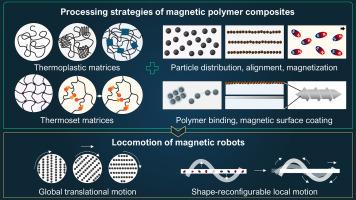
微型磁性机器人可以无线操纵到超出手动控制范围的难以到达的区域,实现多种功能,如药物输送,微流体控制,货物运输,超精密抛光和微塑料去除。从机械工程的角度来看,机器人运动在之前的综述中已经得到了广泛的讨论。然而,从聚合物和材料科学的角度来看,有针对性的、高精度的驱动需要多学科的理解,这在早期的综述中仍然没有得到充分的覆盖。本文综述了近年来用于磁性机器人驱动的磁响应聚合物复合材料(即磁性聚合物复合材料)的加工-结构-性能-性能关系。通过考虑磁性填料的磁性和聚合物基体的热加工性,我们讨论了磁性聚合物复合材料的加工策略和基本原理。在全面了解磁性聚合物复合材料的加工、结构、性能和驱动的基础上,讨论了毫米至纳米级机器人的运动问题。这篇综述提供了推进磁性机器人所需的见解,为未来具有多种生物医学、环境、工业和跨学科功能的小型化驱动器和机器人铺平了道路。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Processing–Structure–Property–Performance relationships of polymer composites for untethered magnetic robotics
Miniaturized magnetic robots can be wirelessly maneuvered into hard-to-reach regions beyond the limits of manual control, enabling diverse functionalities such as drug delivery, microfluidic control, cargo transportation, ultraprecision polishing, and microplastic removal. From the perspective of mechanical engineering, robot locomotion has been extensively discussed in previous reviews. However, targeted and high-precision actuation requires multidisciplinary understanding from the perspective of polymer and materials science, which remains insufficiently covered in earlier reviews. This review aims to elucidate processing–structure–property–performance relationships in recent magnetically responsive polymer composites (i.e., magnetic polymer composites) for magnetic robot actuation. We address processing strategies and underlying rationales for magnetic polymer composites by considering magnetic properties of magnetic fillers and thermal processability of polymer matrices. Locomotion of millimeter-to-nanometer scale robots is discussed based on comprehensive understanding of processing, structure, properties, and actuation of magnetic polymer composites. This review offers insights required to advance magnetic robotics, paving the way for future miniaturized actuators and robots with diverse biomedical, environmental, industrial, and interdisciplinary functions.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Progress in Polymer Science
化学-高分子科学
CiteScore
48.70
自引率
1.10%
发文量
54
审稿时长
38 days
期刊介绍:
Progress in Polymer Science is a journal that publishes state-of-the-art overview articles in the field of polymer science and engineering. These articles are written by internationally recognized authorities in the discipline, making it a valuable resource for staying up-to-date with the latest developments in this rapidly growing field.
The journal serves as a link between original articles, innovations published in patents, and the most current knowledge of technology. It covers a wide range of topics within the traditional fields of polymer science, including chemistry, physics, and engineering involving polymers. Additionally, it explores interdisciplinary developing fields such as functional and specialty polymers, biomaterials, polymers in drug delivery, polymers in electronic applications, composites, conducting polymers, liquid crystalline materials, and the interphases between polymers and ceramics. The journal also highlights new fabrication techniques that are making significant contributions to the field.
The subject areas covered by Progress in Polymer Science include biomaterials, materials chemistry, organic chemistry, polymers and plastics, surfaces, coatings and films, and nanotechnology. The journal is indexed and abstracted in various databases, including Materials Science Citation Index, Chemical Abstracts, Engineering Index, Current Contents, FIZ Karlsruhe, Scopus, and INSPEC.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


