{"title":"用于求解时变非线性方程的组合离散时间归零神经网络的设计与分析。","authors":"Zhisheng Ma, Shaobin Huang","doi":"10.3389/fnbot.2025.1576473","DOIUrl":null,"url":null,"abstract":"<p><p>Zeroing neural network (ZNN) is viewed as an effective solution to time-varying nonlinear equation (TVNE). In this paper, a further study is shown by proposing a novel combined discrete-time ZNN (CDTZNN) model for solving TVNE. Specifically, a new difference formula, which is called the Taylor difference formula, is constructed for first-order derivative approximation by following Taylor series expansion. The Taylor difference formula is then used to discretize the continuous-time ZNN model in the previous study. The corresponding DTZNN model is obtained, where the direct Jacobian matrix inversion is required (being time consuming). Another DTZNN model for computing the inverse of Jacobian matrix is established to solve the aforementioned limitation. The novel CDTZNN model for solving the TVNE is thus developed by combining the two models. Theoretical analysis and numerical results demonstrate the efficacy of the proposed CDTZNN model. The CDTZNN applicability is further indicated by applying the proposed model to the motion planning of robot manipulators.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1576473"},"PeriodicalIF":2.8000,"publicationDate":"2025-07-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12289663/pdf/","citationCount":"0","resultStr":"{\"title\":\"Design and analysis of combined discrete-time zeroing neural network for solving time-varying nonlinear equation with robot application.\",\"authors\":\"Zhisheng Ma, Shaobin Huang\",\"doi\":\"10.3389/fnbot.2025.1576473\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Zeroing neural network (ZNN) is viewed as an effective solution to time-varying nonlinear equation (TVNE). In this paper, a further study is shown by proposing a novel combined discrete-time ZNN (CDTZNN) model for solving TVNE. Specifically, a new difference formula, which is called the Taylor difference formula, is constructed for first-order derivative approximation by following Taylor series expansion. The Taylor difference formula is then used to discretize the continuous-time ZNN model in the previous study. The corresponding DTZNN model is obtained, where the direct Jacobian matrix inversion is required (being time consuming). Another DTZNN model for computing the inverse of Jacobian matrix is established to solve the aforementioned limitation. The novel CDTZNN model for solving the TVNE is thus developed by combining the two models. Theoretical analysis and numerical results demonstrate the efficacy of the proposed CDTZNN model. The CDTZNN applicability is further indicated by applying the proposed model to the motion planning of robot manipulators.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1576473\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-07-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12289663/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1576473\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1576473","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Design and analysis of combined discrete-time zeroing neural network for solving time-varying nonlinear equation with robot application.
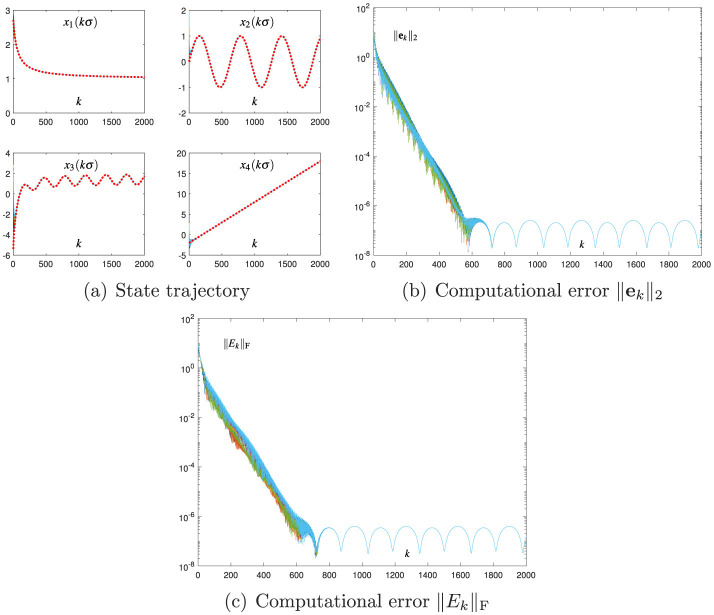
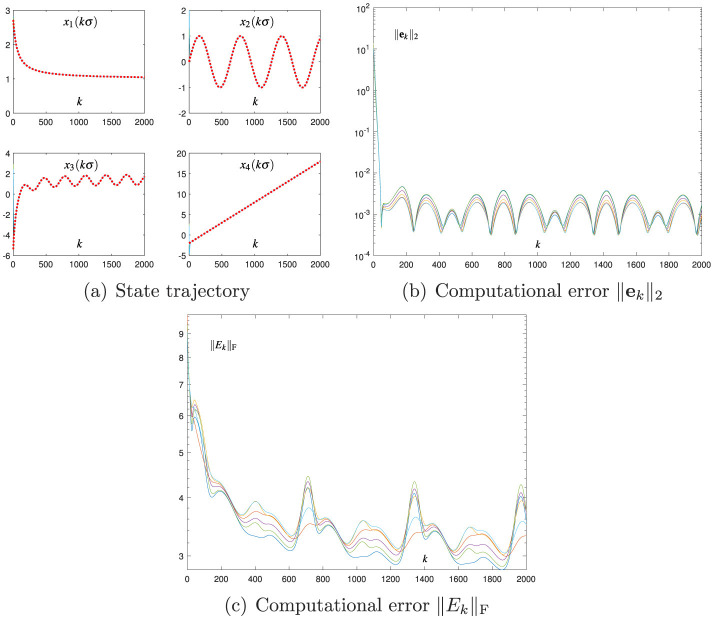
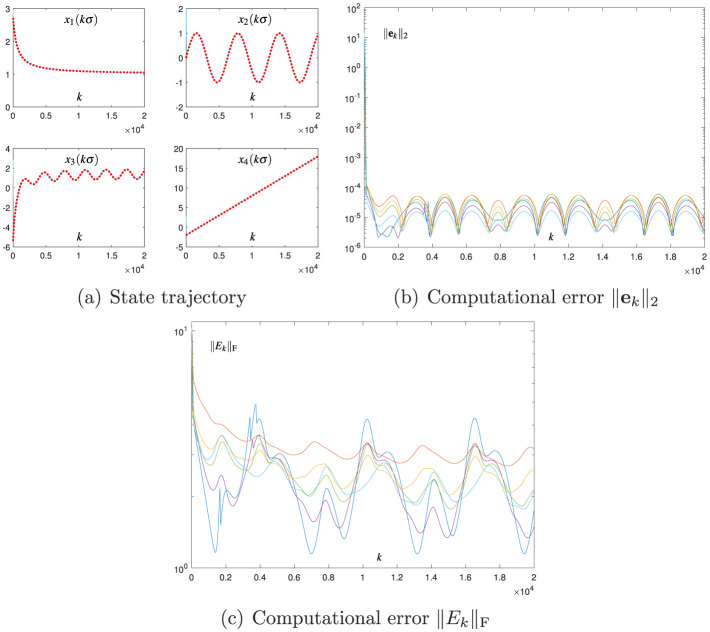
Zeroing neural network (ZNN) is viewed as an effective solution to time-varying nonlinear equation (TVNE). In this paper, a further study is shown by proposing a novel combined discrete-time ZNN (CDTZNN) model for solving TVNE. Specifically, a new difference formula, which is called the Taylor difference formula, is constructed for first-order derivative approximation by following Taylor series expansion. The Taylor difference formula is then used to discretize the continuous-time ZNN model in the previous study. The corresponding DTZNN model is obtained, where the direct Jacobian matrix inversion is required (being time consuming). Another DTZNN model for computing the inverse of Jacobian matrix is established to solve the aforementioned limitation. The novel CDTZNN model for solving the TVNE is thus developed by combining the two models. Theoretical analysis and numerical results demonstrate the efficacy of the proposed CDTZNN model. The CDTZNN applicability is further indicated by applying the proposed model to the motion planning of robot manipulators.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


