{"title":"采用单目相机的18自由度手集成力-位置多模态感知","authors":"Shiwei Chen, Jiapeng Li, Zhiming Deng, Peiji Wang, Cheng Wei, Xibin Cao","doi":"10.1038/s41467-025-62122-0","DOIUrl":null,"url":null,"abstract":"<p>The anthropomorphic hand plays a crucial role in human-machine interaction tasks. However, there are very few hands that realize multimodal perception with high degrees of freedom (DOF) in a low-cost way. Here, we present a dexterous hand that achieves multimodal sensing solely through a camera. The hand has 18 DOF but does not require any position or force sensors, making it cost-effective and easy to manufacture. We develop an integrated forearm for the hand that provides both actuation and multimodal sensing information simultaneously. This includes the 18 joint angles, 5 fingertip positions and contact forces, and information on object softness and contour. The core principle of perception is that the camera can track the displacement and tension of all tendons simultaneously. The multimodal perception model is developed by characterizing tendon properties and coupling them with the hand dynamics. Experiments indicate that our hand has potential in multimodal sensing and dexterity.</p>","PeriodicalId":19066,"journal":{"name":"Nature Communications","volume":"14 1","pages":"6801"},"PeriodicalIF":15.7000,"publicationDate":"2025-07-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An 18-DOF hand integrating force–position multimodal perception using a monocular camera\",\"authors\":\"Shiwei Chen, Jiapeng Li, Zhiming Deng, Peiji Wang, Cheng Wei, Xibin Cao\",\"doi\":\"10.1038/s41467-025-62122-0\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The anthropomorphic hand plays a crucial role in human-machine interaction tasks. However, there are very few hands that realize multimodal perception with high degrees of freedom (DOF) in a low-cost way. Here, we present a dexterous hand that achieves multimodal sensing solely through a camera. The hand has 18 DOF but does not require any position or force sensors, making it cost-effective and easy to manufacture. We develop an integrated forearm for the hand that provides both actuation and multimodal sensing information simultaneously. This includes the 18 joint angles, 5 fingertip positions and contact forces, and information on object softness and contour. The core principle of perception is that the camera can track the displacement and tension of all tendons simultaneously. The multimodal perception model is developed by characterizing tendon properties and coupling them with the hand dynamics. Experiments indicate that our hand has potential in multimodal sensing and dexterity.</p>\",\"PeriodicalId\":19066,\"journal\":{\"name\":\"Nature Communications\",\"volume\":\"14 1\",\"pages\":\"6801\"},\"PeriodicalIF\":15.7000,\"publicationDate\":\"2025-07-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Nature Communications\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41467-025-62122-0\",\"RegionNum\":1,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Nature Communications","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41467-025-62122-0","RegionNum":1,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
An 18-DOF hand integrating force–position multimodal perception using a monocular camera
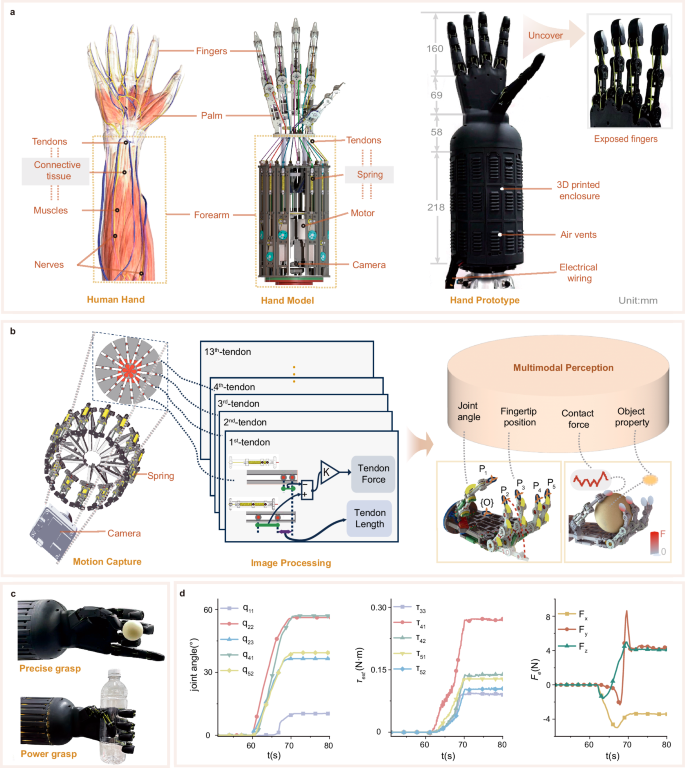
The anthropomorphic hand plays a crucial role in human-machine interaction tasks. However, there are very few hands that realize multimodal perception with high degrees of freedom (DOF) in a low-cost way. Here, we present a dexterous hand that achieves multimodal sensing solely through a camera. The hand has 18 DOF but does not require any position or force sensors, making it cost-effective and easy to manufacture. We develop an integrated forearm for the hand that provides both actuation and multimodal sensing information simultaneously. This includes the 18 joint angles, 5 fingertip positions and contact forces, and information on object softness and contour. The core principle of perception is that the camera can track the displacement and tension of all tendons simultaneously. The multimodal perception model is developed by characterizing tendon properties and coupling them with the hand dynamics. Experiments indicate that our hand has potential in multimodal sensing and dexterity.
期刊介绍:
Nature Communications, an open-access journal, publishes high-quality research spanning all areas of the natural sciences. Papers featured in the journal showcase significant advances relevant to specialists in each respective field. With a 2-year impact factor of 16.6 (2022) and a median time of 8 days from submission to the first editorial decision, Nature Communications is committed to rapid dissemination of research findings. As a multidisciplinary journal, it welcomes contributions from biological, health, physical, chemical, Earth, social, mathematical, applied, and engineering sciences, aiming to highlight important breakthroughs within each domain.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


