微型分蘖防下沉行走轮仿生设计及轮-土相互作用模型
IF 3.7
3区 工程技术
Q3 ENGINEERING, ENVIRONMENTAL
引用次数: 0
摘要
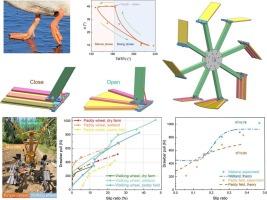
现有的车轮在穿越稻田时表现出不理想的性能。本研究的目的是研制一种适合水田使用的水轮。首先,利用野鸭的运动特征,分析了蹼足的形态变化和模式。其次,提出并设计了一种具有抗下沉和高牵引特性的步行轮。同时,建立了接触面积与腿脚角度变化关系的模型。随后,对行走轮和稻田轮进行了一系列的田间试验。在滑移比为0 ~ 0.47的范围内,行走轮的拖杆拉力、驱动转矩和下沉逐渐增大,牵引效率先上升后逐渐减小。在水田和湿地中,与水田轮相比,牵引杆拉力分别提高了97.29%和51.65%。这些发现证实了行走轮优越的牵引和穿越能力。最后,建立了拉杆拉力与滑移率变化关系的地质力学模型。该模型有可能为增强步行轮的牵引性能提供理论和技术基础。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Bionic design of a anti-sinking walking wheel for micro tillers and wheel-soil interaction model
The existing wheels exhibit suboptimal performance when traversing the paddy fields. This study aims to develop a wheel suitable for the paddy fields. Firstly, an analysis was conducted into the morphological alterations and patterns of the webbed foot, leveraging the kinematic characteristics of mallards. Secondly, a walking wheel featuring anti-sinking and high-traction attributes was conceptualized and designed. Concurrently, a model elucidating the relationship between the contact area and the leg-foot angle variation was formulated. Subsequently, a series of field trials about the walking wheel and the paddy wheel were measured. Within the range of the slip ratio from 0 to 0.47, the drawbar pull, driving torque and sinkage of the walking wheel gradually increase, and the traction efficiency initially ascended and subsequently tapered off. In the paddy field and wetland, in comparison to the paddy wheel, the drawbar pull was augmented by 97.29 % and 51.65 % respectively. These findings validate the superior traction and traversal capabilities of the walking wheel. Finally, a terramechanics model delineating the relationship between the drawbar pull and slip ratio variation was established. This model holds the potential to furnish theoretical and technical underpinnings for augmenting the traction performance of walking wheels.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Journal of Terramechanics
工程技术-工程:环境
CiteScore
5.90
自引率
8.30%
发文量
33
审稿时长
15.3 weeks
期刊介绍:
The Journal of Terramechanics is primarily devoted to scientific articles concerned with research, design, and equipment utilization in the field of terramechanics.
The Journal of Terramechanics is the leading international journal serving the multidisciplinary global off-road vehicle and soil working machinery industries, and related user community, governmental agencies and universities.
The Journal of Terramechanics provides a forum for those involved in research, development, design, innovation, testing, application and utilization of off-road vehicles and soil working machinery, and their sub-systems and components. The Journal presents a cross-section of technical papers, reviews, comments and discussions, and serves as a medium for recording recent progress in the field.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


