基于轻量级学习的水下桥梁检测声纳点云语义分割
IF 11.5
1区 工程技术
Q1 CONSTRUCTION & BUILDING TECHNOLOGY
引用次数: 0
摘要
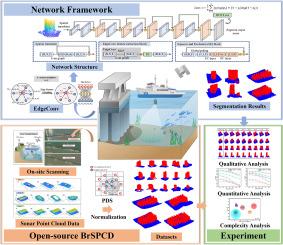
桥梁基础和水下地形的点云语义分割是结构检测和冲刷监测的重要内容。然而,水下环境噪声和旋转干扰提出了重大挑战。现有算法鲁棒性有限,缺乏轻量级模型。针对这些局限性,提出了一种基于动态图卷积神经网络的轻量级语义分割网络。该网络采用边缘卷积进行特征提取,挤压和激励块进行特征细化,密集连接结构增强鲁棒性。建立了桥梁声纳点云数据集BrSPCD,用于训练和评估。实验结果表明,该方法具有良好的分割性能和鲁棒性,在最大噪声下F1分数下降4.87%,在最大旋转冲击下F1分数下降4.11%。消融研究证实了注意阻塞和密集连接的有效性。此外,复杂性分析显示,与现有方法相比,平均运行时间减少了85.02%。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Lightweight learning-based sonar point cloud semantic segmentation for underwater bridge inspection
Point cloud semantic segmentation of bridge foundations and underwater terrain is essential for structure inspection and scour monitoring. However, underwater environmental noise and rotational disturbances present significant challenges. The existing algorithms demonstrate limited robustness and lack a lightweight model. To address these limitations, a lightweight semantic segmentation network based on the dynamic graph convolutional neural network is proposed. The network employs edge convolutions for feature extraction, a Squeeze and Excitation block for feature refinement, and a densely connected structure enhancing the robustness. A bridge sonar point cloud dataset, BrSPCD, was created for training and evaluation. The experimental results demonstrate superior segmentation performance and robustness, with an F1 score decline of 4.87 % under maximum noise and a decline of 4.11 % under maximum rotational impact. Ablation studies validate the effectiveness of the attention block and dense connectivity. Additionally, complexity analysis shows an 85.02 % reduction in average runtime compared to existing methods.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Automation in Construction
工程技术-工程:土木
CiteScore
19.20
自引率
16.50%
发文量
563
审稿时长
8.5 months
期刊介绍:
Automation in Construction is an international journal that focuses on publishing original research papers related to the use of Information Technologies in various aspects of the construction industry. The journal covers topics such as design, engineering, construction technologies, and the maintenance and management of constructed facilities.
The scope of Automation in Construction is extensive and covers all stages of the construction life cycle. This includes initial planning and design, construction of the facility, operation and maintenance, as well as the eventual dismantling and recycling of buildings and engineering structures.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


