S Nagadevi, G Abirami, R Brindha, T Prabhakara Rao, Gyanendra Prasad Joshi, Woong Cho
{"title":"基于多级融合的高效无人机遥感影像土地覆盖分类特征工程框架。","authors":"S Nagadevi, G Abirami, R Brindha, T Prabhakara Rao, Gyanendra Prasad Joshi, Woong Cho","doi":"10.1038/s41598-025-08930-2","DOIUrl":null,"url":null,"abstract":"<p><p>In recent years, unmanned aerial vehicles (UAVs) have attracted more attention. UAVs have numerous manifest benefits over traditional manned aircraft, mainly regarding operator safety, operational expense, and the possibility of complex/hazardous environments such as land cover classification and accessibility for civil applications. A land cover image classification of scenes categorizes the aerial images, captured using drones by masking some ground matters and kinds of land covers, into several semantical forms. Current technological advances have made it simpler to set up an unmanned aerial system with composite topology to reach refined missions that were formerly impossible without real human connections. Nevertheless, networked UAVs are vulnerable to malicious attacks, and therefore intrusion detection systems (IDSs) are logically derived to address the vulnerabilities and/or attacks. Deep learning (DL) methods are essential for processing security problems in UAV networks. This paper presents a Privacy-Preserving Intrusion Detection Model for UAV-Based Remote Sensing Applications in Land Cover Classification Using Multilevel Fusion Feature Engineering (IDUAVRS-LCCMFFE) technique. The main intention of the IDUAVRS-LCCMFFE technique is to provide an effective model for land cover classification using UAV images in dynamic environments. Initially, the image pre-processing stage applies a joint bilateral filter (JBF) model to enhance image quality by removing noise. Furthermore, the feature extraction process uses the fusion models comprising NASNetMobile, ResNet50, and VGG19. Moreover, the proposed IDUAVRS-LCCMFFE model employs the Elman recurrent neural network (ERNN) model for the land cover classification process. Finally, the hyperparameter selection of the ERNN model is accomplished by implementing the salp swarm algorithm (SSA) model. The experimentation of the IDUAVRS-LCCMFFE approach is examined under the ToN-IoT dataset, and the outcome is computed under different measures. The performance validation of the IDUAVRS-LCCMFFE approach portrayed a superior accuracy value of 99.66% and 96.47% under ToN-IoT and EuroSat datasets.</p>","PeriodicalId":21811,"journal":{"name":"Scientific Reports","volume":"15 1","pages":"23707"},"PeriodicalIF":3.9000,"publicationDate":"2025-07-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12229523/pdf/","citationCount":"0","resultStr":"{\"title\":\"An efficient privacy-preserving multilevel fusion-based feature engineering framework for UAV-enabled land cover classification using remote sensing images.\",\"authors\":\"S Nagadevi, G Abirami, R Brindha, T Prabhakara Rao, Gyanendra Prasad Joshi, Woong Cho\",\"doi\":\"10.1038/s41598-025-08930-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>In recent years, unmanned aerial vehicles (UAVs) have attracted more attention. UAVs have numerous manifest benefits over traditional manned aircraft, mainly regarding operator safety, operational expense, and the possibility of complex/hazardous environments such as land cover classification and accessibility for civil applications. A land cover image classification of scenes categorizes the aerial images, captured using drones by masking some ground matters and kinds of land covers, into several semantical forms. Current technological advances have made it simpler to set up an unmanned aerial system with composite topology to reach refined missions that were formerly impossible without real human connections. Nevertheless, networked UAVs are vulnerable to malicious attacks, and therefore intrusion detection systems (IDSs) are logically derived to address the vulnerabilities and/or attacks. Deep learning (DL) methods are essential for processing security problems in UAV networks. This paper presents a Privacy-Preserving Intrusion Detection Model for UAV-Based Remote Sensing Applications in Land Cover Classification Using Multilevel Fusion Feature Engineering (IDUAVRS-LCCMFFE) technique. The main intention of the IDUAVRS-LCCMFFE technique is to provide an effective model for land cover classification using UAV images in dynamic environments. Initially, the image pre-processing stage applies a joint bilateral filter (JBF) model to enhance image quality by removing noise. Furthermore, the feature extraction process uses the fusion models comprising NASNetMobile, ResNet50, and VGG19. Moreover, the proposed IDUAVRS-LCCMFFE model employs the Elman recurrent neural network (ERNN) model for the land cover classification process. Finally, the hyperparameter selection of the ERNN model is accomplished by implementing the salp swarm algorithm (SSA) model. The experimentation of the IDUAVRS-LCCMFFE approach is examined under the ToN-IoT dataset, and the outcome is computed under different measures. The performance validation of the IDUAVRS-LCCMFFE approach portrayed a superior accuracy value of 99.66% and 96.47% under ToN-IoT and EuroSat datasets.</p>\",\"PeriodicalId\":21811,\"journal\":{\"name\":\"Scientific Reports\",\"volume\":\"15 1\",\"pages\":\"23707\"},\"PeriodicalIF\":3.9000,\"publicationDate\":\"2025-07-03\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12229523/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Scientific Reports\",\"FirstCategoryId\":\"103\",\"ListUrlMain\":\"https://doi.org/10.1038/s41598-025-08930-2\",\"RegionNum\":2,\"RegionCategory\":\"综合性期刊\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MULTIDISCIPLINARY SCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Scientific Reports","FirstCategoryId":"103","ListUrlMain":"https://doi.org/10.1038/s41598-025-08930-2","RegionNum":2,"RegionCategory":"综合性期刊","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MULTIDISCIPLINARY SCIENCES","Score":null,"Total":0}
An efficient privacy-preserving multilevel fusion-based feature engineering framework for UAV-enabled land cover classification using remote sensing images.
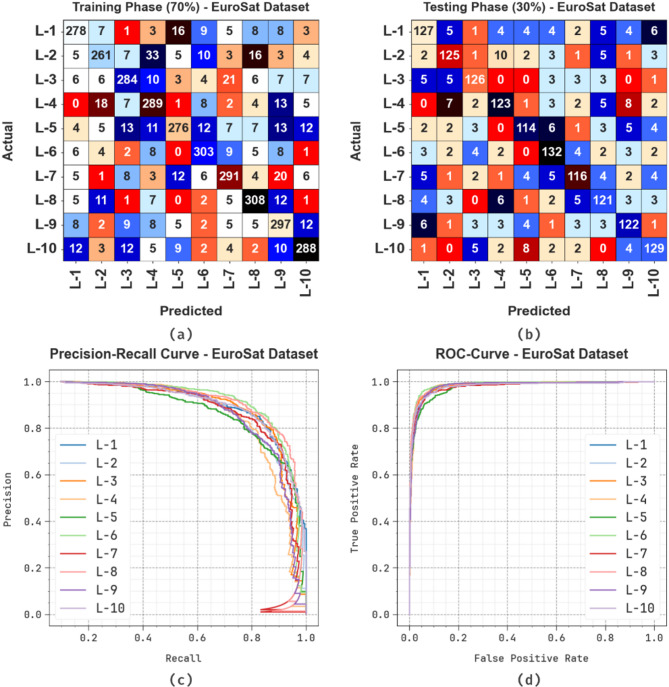
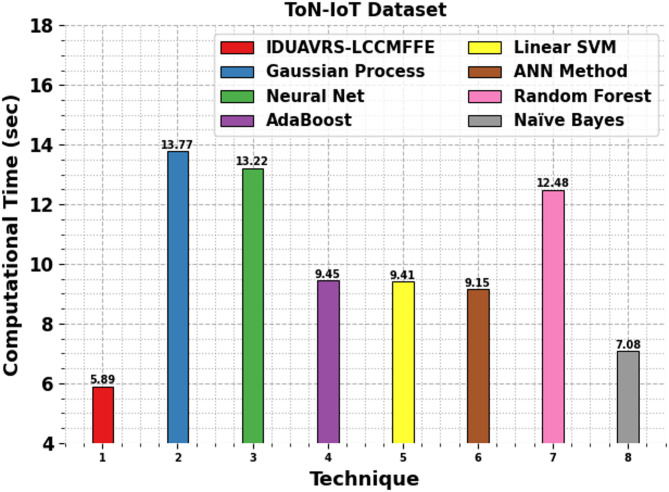
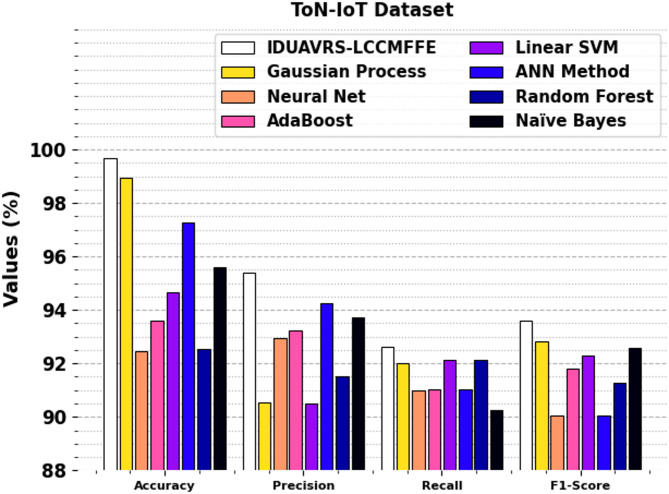
In recent years, unmanned aerial vehicles (UAVs) have attracted more attention. UAVs have numerous manifest benefits over traditional manned aircraft, mainly regarding operator safety, operational expense, and the possibility of complex/hazardous environments such as land cover classification and accessibility for civil applications. A land cover image classification of scenes categorizes the aerial images, captured using drones by masking some ground matters and kinds of land covers, into several semantical forms. Current technological advances have made it simpler to set up an unmanned aerial system with composite topology to reach refined missions that were formerly impossible without real human connections. Nevertheless, networked UAVs are vulnerable to malicious attacks, and therefore intrusion detection systems (IDSs) are logically derived to address the vulnerabilities and/or attacks. Deep learning (DL) methods are essential for processing security problems in UAV networks. This paper presents a Privacy-Preserving Intrusion Detection Model for UAV-Based Remote Sensing Applications in Land Cover Classification Using Multilevel Fusion Feature Engineering (IDUAVRS-LCCMFFE) technique. The main intention of the IDUAVRS-LCCMFFE technique is to provide an effective model for land cover classification using UAV images in dynamic environments. Initially, the image pre-processing stage applies a joint bilateral filter (JBF) model to enhance image quality by removing noise. Furthermore, the feature extraction process uses the fusion models comprising NASNetMobile, ResNet50, and VGG19. Moreover, the proposed IDUAVRS-LCCMFFE model employs the Elman recurrent neural network (ERNN) model for the land cover classification process. Finally, the hyperparameter selection of the ERNN model is accomplished by implementing the salp swarm algorithm (SSA) model. The experimentation of the IDUAVRS-LCCMFFE approach is examined under the ToN-IoT dataset, and the outcome is computed under different measures. The performance validation of the IDUAVRS-LCCMFFE approach portrayed a superior accuracy value of 99.66% and 96.47% under ToN-IoT and EuroSat datasets.
期刊介绍:
We publish original research from all areas of the natural sciences, psychology, medicine and engineering. You can learn more about what we publish by browsing our specific scientific subject areas below or explore Scientific Reports by browsing all articles and collections.
Scientific Reports has a 2-year impact factor: 4.380 (2021), and is the 6th most-cited journal in the world, with more than 540,000 citations in 2020 (Clarivate Analytics, 2021).
•Engineering
Engineering covers all aspects of engineering, technology, and applied science. It plays a crucial role in the development of technologies to address some of the world''s biggest challenges, helping to save lives and improve the way we live.
•Physical sciences
Physical sciences are those academic disciplines that aim to uncover the underlying laws of nature — often written in the language of mathematics. It is a collective term for areas of study including astronomy, chemistry, materials science and physics.
•Earth and environmental sciences
Earth and environmental sciences cover all aspects of Earth and planetary science and broadly encompass solid Earth processes, surface and atmospheric dynamics, Earth system history, climate and climate change, marine and freshwater systems, and ecology. It also considers the interactions between humans and these systems.
•Biological sciences
Biological sciences encompass all the divisions of natural sciences examining various aspects of vital processes. The concept includes anatomy, physiology, cell biology, biochemistry and biophysics, and covers all organisms from microorganisms, animals to plants.
•Health sciences
The health sciences study health, disease and healthcare. This field of study aims to develop knowledge, interventions and technology for use in healthcare to improve the treatment of patients.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


