Dae-Hwan Lee, Bong-Sik Woo, Jong-Hyeon Lim, Jin-Ook Choi, Yong-Hwa Park
{"title":"不同类型RAGT对康复医院脑卒中低水平独立行走患者平衡功能的影响","authors":"Dae-Hwan Lee, Bong-Sik Woo, Jong-Hyeon Lim, Jin-Ook Choi, Yong-Hwa Park","doi":"10.1515/med-2025-1212","DOIUrl":null,"url":null,"abstract":"<p><strong>Background and aim: </strong>Stroke patients with low levels of walking independence often experience persistent deficits in gait and balance, which significantly limit their functional mobility and quality of life. Robotic-assist gait training (RAGT) has emerged as a promising intervention to promote motor recovery and improve postural control in this patients. While previous studies have demonstrated the benefits of RAGT, few have directly compared the effects of fixed end-effector type and mobile robotic gait devices in patients with severely impaired ambulation. This study aimed to investigate and compare the effects of these two robotic gait training on balance and lower extremities motor recovery in stroke patients classified as functional ambulation category 0 to 2.</p><p><strong>Methods: </strong>Twenty-eight stroke patients were randomly assigned to either end-effector or mobile robot groups, undergoing 12 weeks of therapy with one daily robotic session and seven conventional physical therapy sessions per week. Outcomes were measured using the Berg Balance Scale (BBS) and Fugl-Meyer Assessment for Lower Extremity (FMA-LE), with subcategory analysis for reflex activities, volitional movement within synergies, volitional movement mixing synergies, volitional movement with little or no synergy, normal reflex activity, and coordination/speed.</p><p><strong>Results: </strong>Both groups showed significant improvements in BBS and FMA-LE, with the mobile robot group showing greater gains. Both groups improved in walking independence, though no significant difference was found between them. Subcategory analysis showed improvements in reflex activities and coordination/speed in both groups, but volitional movement within synergies and volitional movement with little or no synergy improved only in the mobile robot group. Correlation analysis revealed significant relationships between FAC and BBS, and BBS and reflex activities. Volitional movement within synergies and volitional movement mixing synergies had high correlations with motor recovery.</p><p><strong>Conclusion: </strong>Both robotic methods effectively improved balance and motor recovery, with mobile robots showing greater potential for enhancing functional autonomy.</p>","PeriodicalId":19715,"journal":{"name":"Open Medicine","volume":"20 1","pages":"20251212"},"PeriodicalIF":1.6000,"publicationDate":"2025-06-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12205575/pdf/","citationCount":"0","resultStr":"{\"title\":\"The effects of different types of RAGT on balance function in stroke patients with low levels of independent walking in a convalescent rehabilitation hospital.\",\"authors\":\"Dae-Hwan Lee, Bong-Sik Woo, Jong-Hyeon Lim, Jin-Ook Choi, Yong-Hwa Park\",\"doi\":\"10.1515/med-2025-1212\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background and aim: </strong>Stroke patients with low levels of walking independence often experience persistent deficits in gait and balance, which significantly limit their functional mobility and quality of life. Robotic-assist gait training (RAGT) has emerged as a promising intervention to promote motor recovery and improve postural control in this patients. While previous studies have demonstrated the benefits of RAGT, few have directly compared the effects of fixed end-effector type and mobile robotic gait devices in patients with severely impaired ambulation. This study aimed to investigate and compare the effects of these two robotic gait training on balance and lower extremities motor recovery in stroke patients classified as functional ambulation category 0 to 2.</p><p><strong>Methods: </strong>Twenty-eight stroke patients were randomly assigned to either end-effector or mobile robot groups, undergoing 12 weeks of therapy with one daily robotic session and seven conventional physical therapy sessions per week. Outcomes were measured using the Berg Balance Scale (BBS) and Fugl-Meyer Assessment for Lower Extremity (FMA-LE), with subcategory analysis for reflex activities, volitional movement within synergies, volitional movement mixing synergies, volitional movement with little or no synergy, normal reflex activity, and coordination/speed.</p><p><strong>Results: </strong>Both groups showed significant improvements in BBS and FMA-LE, with the mobile robot group showing greater gains. Both groups improved in walking independence, though no significant difference was found between them. Subcategory analysis showed improvements in reflex activities and coordination/speed in both groups, but volitional movement within synergies and volitional movement with little or no synergy improved only in the mobile robot group. Correlation analysis revealed significant relationships between FAC and BBS, and BBS and reflex activities. Volitional movement within synergies and volitional movement mixing synergies had high correlations with motor recovery.</p><p><strong>Conclusion: </strong>Both robotic methods effectively improved balance and motor recovery, with mobile robots showing greater potential for enhancing functional autonomy.</p>\",\"PeriodicalId\":19715,\"journal\":{\"name\":\"Open Medicine\",\"volume\":\"20 1\",\"pages\":\"20251212\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2025-06-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12205575/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Open Medicine\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1515/med-2025-1212\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q2\",\"JCRName\":\"MEDICINE, GENERAL & INTERNAL\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Open Medicine","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1515/med-2025-1212","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"MEDICINE, GENERAL & INTERNAL","Score":null,"Total":0}
The effects of different types of RAGT on balance function in stroke patients with low levels of independent walking in a convalescent rehabilitation hospital.
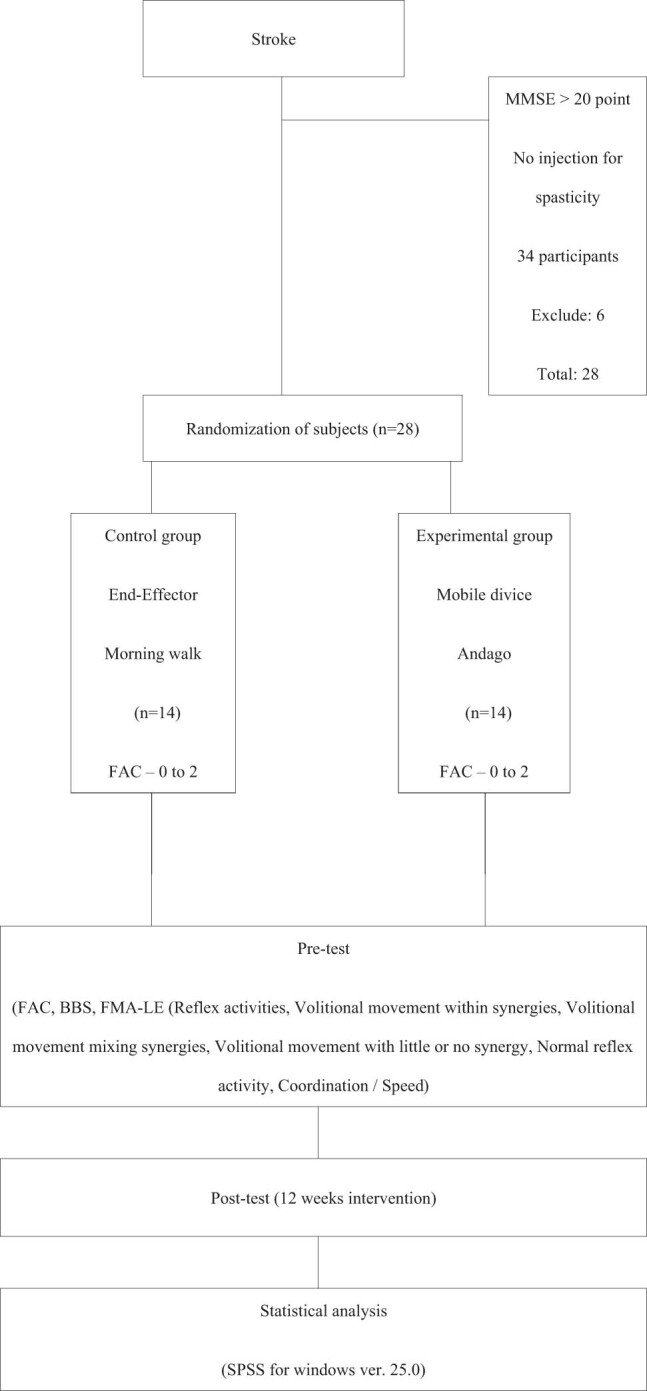
Background and aim: Stroke patients with low levels of walking independence often experience persistent deficits in gait and balance, which significantly limit their functional mobility and quality of life. Robotic-assist gait training (RAGT) has emerged as a promising intervention to promote motor recovery and improve postural control in this patients. While previous studies have demonstrated the benefits of RAGT, few have directly compared the effects of fixed end-effector type and mobile robotic gait devices in patients with severely impaired ambulation. This study aimed to investigate and compare the effects of these two robotic gait training on balance and lower extremities motor recovery in stroke patients classified as functional ambulation category 0 to 2.
Methods: Twenty-eight stroke patients were randomly assigned to either end-effector or mobile robot groups, undergoing 12 weeks of therapy with one daily robotic session and seven conventional physical therapy sessions per week. Outcomes were measured using the Berg Balance Scale (BBS) and Fugl-Meyer Assessment for Lower Extremity (FMA-LE), with subcategory analysis for reflex activities, volitional movement within synergies, volitional movement mixing synergies, volitional movement with little or no synergy, normal reflex activity, and coordination/speed.
Results: Both groups showed significant improvements in BBS and FMA-LE, with the mobile robot group showing greater gains. Both groups improved in walking independence, though no significant difference was found between them. Subcategory analysis showed improvements in reflex activities and coordination/speed in both groups, but volitional movement within synergies and volitional movement with little or no synergy improved only in the mobile robot group. Correlation analysis revealed significant relationships between FAC and BBS, and BBS and reflex activities. Volitional movement within synergies and volitional movement mixing synergies had high correlations with motor recovery.
Conclusion: Both robotic methods effectively improved balance and motor recovery, with mobile robots showing greater potential for enhancing functional autonomy.
期刊介绍:
Open Medicine is an open access journal that provides users with free, instant, and continued access to all content worldwide. The primary goal of the journal has always been a focus on maintaining the high quality of its published content. Its mission is to facilitate the exchange of ideas between medical science researchers from different countries. Papers connected to all fields of medicine and public health are welcomed. Open Medicine accepts submissions of research articles, reviews, case reports, letters to editor and book reviews.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


