被动自适应并联爬壁机器人的设计与分析
IF 4.4
2区 工程技术
Q1 ENGINEERING, OCEAN
引用次数: 0
摘要
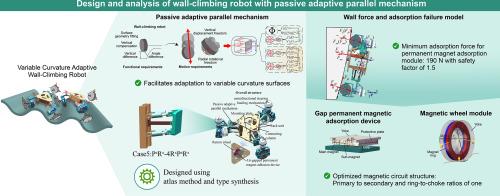
爬壁机器人被广泛用于大型船舶外立面的检测和维护,以确保结构的安全和可靠性能。然而,大多数现有的wcr由于其刚性机构,自由度有限,运动不灵活,难以通过具有可变曲率和密集障碍物的立面。提出了一种集成被动自适应并联机构和全方位转向牵引机构的全向移动WCR。利用图集法设计准则,设计了一种结合转动和平动单元的被动自适应并联机构,补偿了车轮在不规则表面上滚动时的高度差和拟合角。通过将全向转向牵引机构安装在并联机构上,通过特定的运动模式,使机器人能够灵活地调整车轮方向以适应受限环境。考虑黏附力方向随曲率的变化,用一个表示角度变化的指标建立力学平衡关系,计算出保证黏附稳定所需的最小磁力。通过对永磁体模块的电路分析,得出了提高粘接效率和稳定性的最佳参数。实验表明,所研制的机器人能够在具有变曲率和局部障碍物的表面上稳定地附着和灵活地移动,为船舶检测和维修提供了良好的前景。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Design and analysis of wall-climbing robot with passive adaptive parallel mechanism
Wall-climbing robots (WCRs) are widely used for inspecting and maintaining large ship facades to ensure structural safety and reliable performance. However, most existing WCRs hardly pass through facades with variable curvature and dense obstacles because of their rigid mechanisms with limited degrees of freedom and inflexible motion. We propose an omnidirectional mobile WCR integrating a passive adaptive parallel mechanism and omnidirectional steering hauling mechanism. Using the atlas method design criteria, a passive adaptive parallel mechanism combining rotational and translational units was developed, compensating for height differences and fitting angles during wheel rolling on irregular surfaces. By mounting the omnidirectional steering hauling mechanism on the parallel mechanism, specific motion modes enable the robot to flexibly adjust the wheel directions for navigating constrained environments. Considering the adhesive force direction change with curvature, an index representing the varying angle allows us to establish mechanical equilibrium relations and calculate the minimum magnetic force required to ensure stable adhesion. Circuit analysis of the permanent magnet module yielded optimal parameters to enhance adhesion efficiency and stability. Experiments demonstrate that the developed robot can adhere stably and move flexibly on facades with variable curvature and localized obstacles, showing promise for ship inspection and maintenance.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Applied Ocean Research
地学-工程:大洋
CiteScore
8.70
自引率
7.00%
发文量
316
审稿时长
59 days
期刊介绍:
The aim of Applied Ocean Research is to encourage the submission of papers that advance the state of knowledge in a range of topics relevant to ocean engineering.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


