基于crdt的环境辅助生活机器人物联网生态系统知识同步
IF 3.5
3区 计算机科学
Q2 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
摘要
在环境辅助生活(AAL)框架的设计中集成物联网和辅助机器人已被证明是监测和帮助家中老年人的有用解决方案。作为管理捕获的信息和评估人的状况、应对紧急情况、促进身体或认知锻炼等的一种方式,这些系统还可以集成虚拟护理者(VC)。考虑到在这种AAL框架中部署的技术的多样性,决定如何适当地管理知识可能是复杂的。本文建议将AAL框架组织为一个分布式系统,即作为一组自治软件代理的集合,为用户提供单个一致的响应。在这个分布式系统中,代理被部署在本地并处理知识模型的副本。因此,出现了将这些副本合并为一致表示的问题。采用δ-CRDT(无冲突复制数据类型)同步机制,以确保最终的一致性和低通信开销。为了管理AAL生态系统的动态,δ-CRDT与发布/订阅交互协议相结合。通过这种方式,物联网、机器人和VC的性能,通过依赖于它们的功能,有效地适应环境的变化。为了证明建议的有效性,设计了两个用例,其中需要系统的协作响应。第一个是处理使用者可能在家中摔倒的问题,而第二个是处理帮助使用者在公寓内移动小物体的问题。数据的延迟或一致性的测量值表明,该方案的工作令人满意。本文章由计算机程序翻译,如有差异,请以英文原文为准。
CRDT-based knowledge synchronisation in an Internet of Robotics Things ecosystem for Ambient Assisted Living
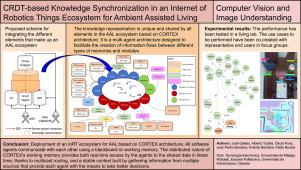
Integrating IoT and assistive robots in the design of Ambient Assisted Living (AAL) frameworks has proven to be a useful solution for monitoring and assisting elderly people at home. As a way to manage the information captured and assess the person’s condition, respond to emergencies, promote physical or cognitive exercises, etc., these systems can also integrate a Virtual Caregiver (VC). Given the diversity of technologies deployed in such an AAL framework, deciding how to manage knowledge appropriately can be complex. This paper proposes to organise the AAL framework as a distributed system, i.e., as a collection of autonomous software agents that provide users with a single coherent response. In this distributed system, agents are deployed locally and handle replicas of the knowledge model. The problem of merging these replicas into a consistent representation, therefore arises.The -CRDT (Conflict-free Replicated Data Type) synchronisation mechanism is employed to ensure the eventual consistency with low communication overhead. To manage the dynamics of the AAL ecosystem, the -CRDT is combined with the publish/subscribe interaction protocol. In this way, the performance of the IoT, the robot and the VC, through the functionalities that depend on them, is efficiently adapted to changes in the context. To demonstrate the validity of the proposal, two use cases have been designed in which a collaborative response from the system is required. The first one deals with a possible fall of the user at home, while the second one deals with the problem of helping the person move small objects around the flat. The measured values of latency or consistency in the data show that the proposal works satisfactorily.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Computer Vision and Image Understanding
工程技术-工程:电子与电气
CiteScore
7.80
自引率
4.40%
发文量
112
审稿时长
79 days
期刊介绍:
The central focus of this journal is the computer analysis of pictorial information. Computer Vision and Image Understanding publishes papers covering all aspects of image analysis from the low-level, iconic processes of early vision to the high-level, symbolic processes of recognition and interpretation. A wide range of topics in the image understanding area is covered, including papers offering insights that differ from predominant views.
Research Areas Include:
• Theory
• Early vision
• Data structures and representations
• Shape
• Range
• Motion
• Matching and recognition
• Architecture and languages
• Vision systems
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


