Nadine Badie, Firas Al-Hafez, Pierre Schumacher, Daniel F B Haeufle, Jan Peters, Syn Schmitt
{"title":"在两足肌肉驱动系统中学习运动的生物启发形态学和任务课程。","authors":"Nadine Badie, Firas Al-Hafez, Pierre Schumacher, Daniel F B Haeufle, Jan Peters, Syn Schmitt","doi":"10.1038/s44172-025-00443-0","DOIUrl":null,"url":null,"abstract":"<p><p>Humans master complex motor skills such as walking and running through a sophisticated blend of learning and adaptation. Replicating this level of skill acquisition with traditional Reinforcement Learning (RL) methods in musculoskeletal humanoid systems is challenging due to intricate control dynamics and over-actuation. Inspired by human developmental learning, here we address these challenges, with a double curriculum approach: a three-stage task curriculum (balance, walk, run) and an up to three-stage morphology curriculum (4 year-old, 12 year-old, adult), mimicking physical growth. This combined approach enables the agent to efficiently learn robust gaits that are adaptable to varying velocities and perturbations. Extensive analysis and ablation studies demonstrate that our method outperforms state-of-the-art exploration techniques for musculoskeletal systems. Our approach is agnostic to the underlying RL algorithm and does not require reward tuning, demonstrations, or specific muscular architecture information, marking a notable advancement in the field.</p>","PeriodicalId":72644,"journal":{"name":"Communications engineering","volume":"4 1","pages":"115"},"PeriodicalIF":0.0000,"publicationDate":"2025-06-20","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12181307/pdf/","citationCount":"0","resultStr":"{\"title\":\"Bioinspired morphology and task curricula for learning locomotion in bipedal muscle-actuated systems.\",\"authors\":\"Nadine Badie, Firas Al-Hafez, Pierre Schumacher, Daniel F B Haeufle, Jan Peters, Syn Schmitt\",\"doi\":\"10.1038/s44172-025-00443-0\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Humans master complex motor skills such as walking and running through a sophisticated blend of learning and adaptation. Replicating this level of skill acquisition with traditional Reinforcement Learning (RL) methods in musculoskeletal humanoid systems is challenging due to intricate control dynamics and over-actuation. Inspired by human developmental learning, here we address these challenges, with a double curriculum approach: a three-stage task curriculum (balance, walk, run) and an up to three-stage morphology curriculum (4 year-old, 12 year-old, adult), mimicking physical growth. This combined approach enables the agent to efficiently learn robust gaits that are adaptable to varying velocities and perturbations. Extensive analysis and ablation studies demonstrate that our method outperforms state-of-the-art exploration techniques for musculoskeletal systems. Our approach is agnostic to the underlying RL algorithm and does not require reward tuning, demonstrations, or specific muscular architecture information, marking a notable advancement in the field.</p>\",\"PeriodicalId\":72644,\"journal\":{\"name\":\"Communications engineering\",\"volume\":\"4 1\",\"pages\":\"115\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2025-06-20\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12181307/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Communications engineering\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1038/s44172-025-00443-0\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Communications engineering","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1038/s44172-025-00443-0","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Bioinspired morphology and task curricula for learning locomotion in bipedal muscle-actuated systems.
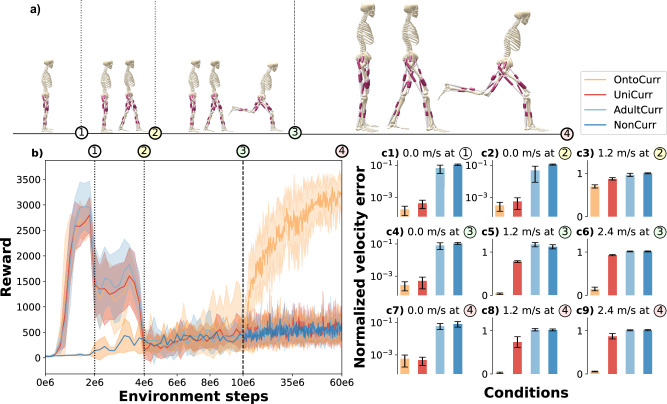
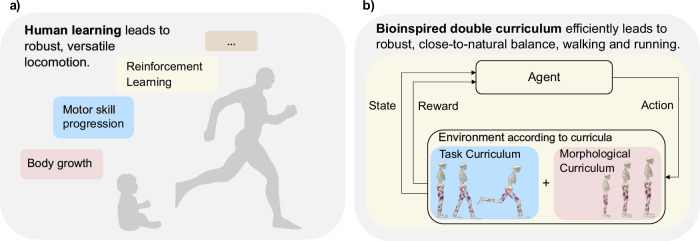
Humans master complex motor skills such as walking and running through a sophisticated blend of learning and adaptation. Replicating this level of skill acquisition with traditional Reinforcement Learning (RL) methods in musculoskeletal humanoid systems is challenging due to intricate control dynamics and over-actuation. Inspired by human developmental learning, here we address these challenges, with a double curriculum approach: a three-stage task curriculum (balance, walk, run) and an up to three-stage morphology curriculum (4 year-old, 12 year-old, adult), mimicking physical growth. This combined approach enables the agent to efficiently learn robust gaits that are adaptable to varying velocities and perturbations. Extensive analysis and ablation studies demonstrate that our method outperforms state-of-the-art exploration techniques for musculoskeletal systems. Our approach is agnostic to the underlying RL algorithm and does not require reward tuning, demonstrations, or specific muscular architecture information, marking a notable advancement in the field.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


