基于深度学习和降维模型的工业机器人视觉实时标定
IF 3.7
2区 工程技术
Q2 ENGINEERING, MANUFACTURING
Precision Engineering-Journal of the International Societies for Precision Engineering and Nanotechnology
Pub Date : 2025-06-13
DOI:10.1016/j.precisioneng.2025.06.011
引用次数: 0
摘要
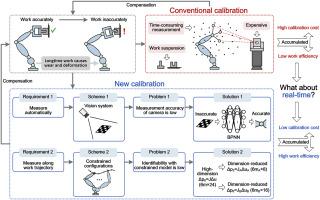
提出了一种六自由度工业机器人的实时标定方法。它旨在解决校准总是暂停机器人的工作,并且由于重复使用昂贵的测量仪器而导致成本很高的问题。为此,提出了一种具有成本效益的摄像机位姿测量策略,该策略将机器人的工作轨迹作为对构型的严格约束,以满足实时性要求。然而,这种效率的提高伴随着精度的下降,因为相机带来了较大的测量误差,轨迹约束导致参数可辨识性降低。首先,为了将摄像机的性能提升到激光跟踪仪等精密仪器的水平,设计了一组神经网络,将摄像机测量的不准确姿态映射到相关关节的准确姿态。其次,提出了一种降维方法,将约束运动误差模型截断为两个模型,使其具有较高的参数可辨识性;仿真结果表明,训练好的网络对关节位姿的预测精度远远高于激光跟踪仪的测量精度。验证了降维模型的标定精度高于典型标定的单一高维模型。最后,提出了一种具有更深规则性的训练数据生成策略,以满足实际场景下的精度要求,实验对比结果验证了该实时标定方法在对机器人精度要求高、不暂停工作的制造业中具有良好的应用潜力。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Vision-based and real-time calibration of industrial robot by using deep learning and dimension-reduced models
A real-time calibration method for six-DoF industrial robot is presented. It aims to address the issue that calibration always suspends the work of robot and is quite costly due to repeated utilization of expensive measurement instrument. For this, a pose measurement strategy with cost-effective cameras is proposed where the work trajectory of robot is considered as a strict constraint on configurations to meet the requirement of real time. However, such efficiency improvement is accompanied by the accuracy decrease because the camera brings large measurement error and the trajectory constraint results in the reduced parameter identifiability. Firstly, to pull up the camera performance to the same level of precise instrument like the laser tracker, a set of neural networks are designed to map the inaccurately measured poses by camera to the accurate poses of concerned joints. Secondly, a dimension-reducing method is proposed to truncate the constrained kinematic-error model into two, which commonly achieve high parameter identifiability. Simulation shows that the prediction accuracy of joint pose with the well-trained networks is much higher than the measurement accuracy of laser tracker. Besides, the calibration accuracy with the dimension-reduced models is validated to be higher than that with the single high-dimension model of typical calibration. Finally, a generation strategy of training data with deeper regularity is proposed to meet the accuracy requirement in real scene, and the comparative results in the experiment validate a good potential of the real-time calibration method in manufacturing that requires high accuracy of robot and no suspension of work.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

CiteScore
7.40
自引率
5.60%
发文量
177
审稿时长
46 days
期刊介绍:
Precision Engineering - Journal of the International Societies for Precision Engineering and Nanotechnology is devoted to the multidisciplinary study and practice of high accuracy engineering, metrology, and manufacturing. The journal takes an integrated approach to all subjects related to research, design, manufacture, performance validation, and application of high precision machines, instruments, and components, including fundamental and applied research and development in manufacturing processes, fabrication technology, and advanced measurement science. The scope includes precision-engineered systems and supporting metrology over the full range of length scales, from atom-based nanotechnology and advanced lithographic technology to large-scale systems, including optical and radio telescopes and macrometrology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


