基于力传感器的3D打印外骨骼上肢康复(EULR)
IF 2.1
Q3 ENGINEERING, ELECTRICAL & ELECTRONIC
引用次数: 0
摘要
本文解决了与商业外骨骼相关的手部康复的有限可及性和高成本的重大挑战,特别是对于低收入到中等收入的个人。本研究的目的是设计和开发一种低成本的3d打印手外骨骼,该外骨骼集成了力传感器技术,为康复提供了更具适应性的解决方案。该方法包括创建一个原型,将3D打印与上肢(肘部)运动和力量的实时监测相结合,确保患者的个性化治疗。该设计采用轻量级结构,由可充电的LiPo电池供电,并利用迷你ESP32微控制器收集传感器参数并驱动伺服电机,从而增强用户体验和功能。结果表明,与现有价格在1,500美元以上的产品相比,拟议的外骨骼显着降低了大约98.4美元/单位的成本。外骨骼手指运动的均方根误差(RMSE)为0.498°±0.709°,具有较高的手部运动跟踪精度。测压元件在所有数据点上的平均线性误差为0.2292%。结果表明,该传感器在标定范围内保持了良好的线性度和精度,适用于静态应用中的精确力测量。此外,力传感器的集成允许在康复训练期间精确反馈,促进更好的结果。这项研究的结论是,这种创新的方法不仅使手部康复更容易实现,而且还鼓励了该领域的进一步研究和发展。通过提供开源设计,该研究促进了研究人员和开发人员之间的合作,为未来外骨骼的增强和适应铺平了道路,以满足不同患者的需求。总的来说,这项工作有助于推进康复技术,最终提高从神经肌肉疾病中恢复的个体的生活质量。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Exoskeleton for Upper Limb Rehabilitation (EULR) with 3D printing technology based on force sensor
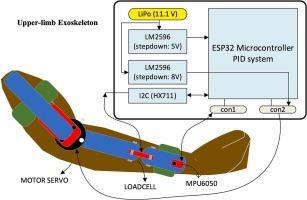
The paper addresses the significant challenge of limited accessibility and high costs associated with commercial exoskeletons for hand rehabilitation, particularly for individuals with low to middle incomes. The aim of this study is to design and develop a low-cost, 3D-printed hand exoskeleton that integrates force sensor technology, providing a more adaptable solution for rehabilitation. The methodology involves creating a prototype that combines 3D printing with real-time monitoring of upper limb (elbow) movements and forces, ensuring personalized treatment for patients. The design incorporates a lightweight structure, powered by a rechargeable LiPo battery, and utilizes mini ESP32 microcontrollers to collect the sensor parameters and drive the servo motor, enhancing user experience and functionality. Results indicate that the proposed exoskeleton significantly reduces costs to approximately 98.4 US$ per unit, compared to existing products priced above 1,500 USD. The mean root mean square error (RMSE) for the exoskeleton’s finger movements was measured at 0.498° ± 0.709°, demonstrating high accuracy in tracking hand movements. The mean linearity error of load cell across all data points was 0.2292 %. These results indicate that the load cell maintains good linearity and accuracy within the calibrated range, and is suitable for precise force measurements in static applications. Additionally, the integration of force sensors allows for precise feedback during rehabilitation exercises, promoting better outcomes. The study concludes that this innovative approach not only makes hand rehabilitation more accessible but also encourages further research and development in the field. By providing an open-source design, the research fosters collaboration among researchers and developers, paving the way for future enhancements and adaptations of the exoskeleton to meet diverse patient needs. Overall, this work contributes to advancing rehabilitation technology, ultimately improving the quality of life for individuals recovering from neuromuscular disorders.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

HardwareX
Engineering-Industrial and Manufacturing Engineering
CiteScore
4.10
自引率
18.20%
发文量
124
审稿时长
24 weeks
期刊介绍:
HardwareX is an open access journal established to promote free and open source designing, building and customizing of scientific infrastructure (hardware). HardwareX aims to recognize researchers for the time and effort in developing scientific infrastructure while providing end-users with sufficient information to replicate and validate the advances presented. HardwareX is open to input from all scientific, technological and medical disciplines. Scientific infrastructure will be interpreted in the broadest sense. Including hardware modifications to existing infrastructure, sensors and tools that perform measurements and other functions outside of the traditional lab setting (such as wearables, air/water quality sensors, and low cost alternatives to existing tools), and the creation of wholly new tools for either standard or novel laboratory tasks. Authors are encouraged to submit hardware developments that address all aspects of science, not only the final measurement, for example, enhancements in sample preparation and handling, user safety, and quality control. The use of distributed digital manufacturing strategies (e.g. 3-D printing) is encouraged. All designs must be submitted under an open hardware license.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


