果园环沟施肥机械化:多段弧线轨迹及其控制方法
IF 5.3
1区 农林科学
Q1 AGRICULTURAL ENGINEERING
引用次数: 0
摘要
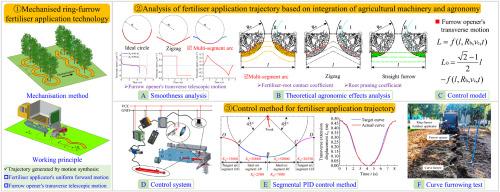
环沟施肥是果园近根精确施肥的一种方法。然而,什么样的施肥轨迹更有利于近根施肥的精准投放和机械操作的顺利进行,以及通过何种方式进行精准控制,目前尚不清楚。因此,本研究提出了一种基于多段弧轨迹的施肥方法,该方法通过近根施肥精度和根修剪系数来评价。建立了开沟器横向运动的控制模型,采用一种新的分段比例积分导数(PID)控制方法对环沟轨迹电液系统进行控制。结果表明,多段弧形轨迹具有突出的优势,犁沟速度平稳,无突变,肥根接触系数是传统直沟轨迹的1.5倍以上,根系修剪系数不超过8.13%。现场试验表明,开沟机横向伸缩运动的实际位移曲线与目标位移曲线的相关系数为>;0.99,在株距为1.3 m和2.3 m时,均方根误差(RMSE)分别为0.010 m和0.011 m。该控制系统能够精确控制多段弧线轨迹,实现近根施肥,机械操作平稳,对植株间距和重载条件具有良好的适应性。该研究为果园机械化环沟施肥技术的发展奠定了理论基础。本文章由计算机程序翻译,如有差异,请以英文原文为准。
Mechanisation of ring-furrow fertiliser application for orchards: A multi-segment arc trajectory and its control method
Ring-furrow fertiliser placement is a precise near-root application method for orchards. However, it is still unclear what kind of fertiliser application trajectory is more conducive to precise near-root fertiliser placement and smooth mechanical operation and by what means it can be precisely controlled. Therefore, this study proposed a fertiliser application method based on a multi-segment arc trajectory that was evaluated by the accuracy of near-root fertiliser placement, and a root pruning coefficient. A control model for the transverse motion of the furrow opener was constructed and a novel method of segmental proportional-integral-derivative (PID) control was adopted to control the electro-hydraulic system for the ring-furrow trajectory. The results indicated that the multi-segment arc trajectory had outstanding advantages, with a smooth furrowing speed without abrupt changes, a fertiliser-root contact coefficient more than 1.5 times that of the traditional straight furrow trajectory, and a root pruning coefficient not exceeding 8.13 %. Field tests showed that the correlation coefficients between actual and target displacement curves of the furrow opener's transverse telescopic motion were >0.99, with the root mean square error (RMSE) of 0.010 m and 0.011 m, respectively, for the plant spacing of 1.3 m and 2.3 m. The control system enabled precise control of the multi-segment arc trajectory for accurate near-root fertiliser placement with smooth mechanical operation and good adaptability to plant spacings and heavy-load conditions. The study laid a theoretical foundation for developing mechanised ring-furrow fertiliser application technology in orchards.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊

Biosystems Engineering
农林科学-农业工程
CiteScore
10.60
自引率
7.80%
发文量
239
审稿时长
53 days
期刊介绍:
Biosystems Engineering publishes research in engineering and the physical sciences that represent advances in understanding or modelling of the performance of biological systems for sustainable developments in land use and the environment, agriculture and amenity, bioproduction processes and the food chain. The subject matter of the journal reflects the wide range and interdisciplinary nature of research in engineering for biological systems.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


