Jiale Lin, Guifang Shao, Dezhi Wu and Qibin Zhuang*,
{"title":"软机器人的集成策略:激光烧结银实现无线传感","authors":"Jiale Lin, Guifang Shao, Dezhi Wu and Qibin Zhuang*, ","doi":"10.1021/acsami.5c06561","DOIUrl":null,"url":null,"abstract":"<p >Soft robots with integrated wireless self-sensing capabilities hold transformative potential for complex environmental exploration and confined-space applications. However, conventional integrated sensing methods force a trade-off between mechanical compliance and precise locomotion monitoring, making wireless, real-time, and high-fidelity locomotion sensing challenging. Here, we present an integrated strategy combining programmable magnetic actuation, laser-sintered flexible strain sensors, and wireless signal transmission to achieve precise, untethered deformation monitoring. Template-assisted magnetization is used to generate spatially resolved magnetic domains, while energy-modulated laser sintering directly fabricates strain sensors on elastomeric substrates. The results show that high-power laser sintering (30 W at 10 mm/s) produces porous silver architectures optimal for strain sensing, with high linearity (±3.2% error) and robust cyclic stability (resistance drift <3.7%). Validation on a tripodal crawling robot reveals that a miniaturized 433 MHz wireless system enables real-time deformation monitoring with a latency of 120 ± 15 μs. This innovative wireless sensing integration opens a paradigm for closed-loop control and adaptive behavior in dynamically deforming soft robots, establishing a scalable framework for embodied intelligence in next-generation robotic systems.</p>","PeriodicalId":5,"journal":{"name":"ACS Applied Materials & Interfaces","volume":"17 25","pages":"37081–37089"},"PeriodicalIF":8.2000,"publicationDate":"2025-06-11","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"An Integrated Strategy for Soft Robotics: Wireless Sensing Enabled by Laser-Sintered Silver\",\"authors\":\"Jiale Lin, Guifang Shao, Dezhi Wu and Qibin Zhuang*, \",\"doi\":\"10.1021/acsami.5c06561\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Soft robots with integrated wireless self-sensing capabilities hold transformative potential for complex environmental exploration and confined-space applications. However, conventional integrated sensing methods force a trade-off between mechanical compliance and precise locomotion monitoring, making wireless, real-time, and high-fidelity locomotion sensing challenging. Here, we present an integrated strategy combining programmable magnetic actuation, laser-sintered flexible strain sensors, and wireless signal transmission to achieve precise, untethered deformation monitoring. Template-assisted magnetization is used to generate spatially resolved magnetic domains, while energy-modulated laser sintering directly fabricates strain sensors on elastomeric substrates. The results show that high-power laser sintering (30 W at 10 mm/s) produces porous silver architectures optimal for strain sensing, with high linearity (±3.2% error) and robust cyclic stability (resistance drift <3.7%). Validation on a tripodal crawling robot reveals that a miniaturized 433 MHz wireless system enables real-time deformation monitoring with a latency of 120 ± 15 μs. This innovative wireless sensing integration opens a paradigm for closed-loop control and adaptive behavior in dynamically deforming soft robots, establishing a scalable framework for embodied intelligence in next-generation robotic systems.</p>\",\"PeriodicalId\":5,\"journal\":{\"name\":\"ACS Applied Materials & Interfaces\",\"volume\":\"17 25\",\"pages\":\"37081–37089\"},\"PeriodicalIF\":8.2000,\"publicationDate\":\"2025-06-11\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ACS Applied Materials & Interfaces\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://pubs.acs.org/doi/10.1021/acsami.5c06561\",\"RegionNum\":2,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Applied Materials & Interfaces","FirstCategoryId":"88","ListUrlMain":"https://pubs.acs.org/doi/10.1021/acsami.5c06561","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
An Integrated Strategy for Soft Robotics: Wireless Sensing Enabled by Laser-Sintered Silver
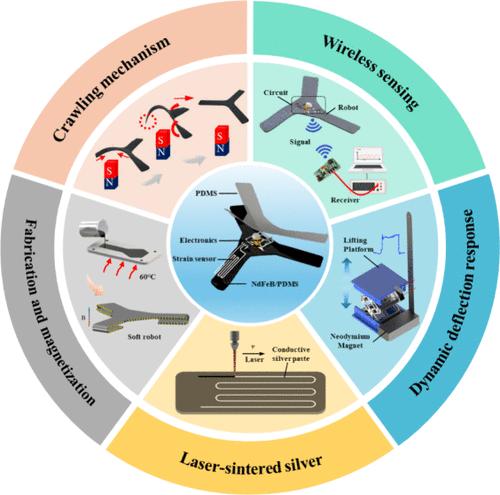
Soft robots with integrated wireless self-sensing capabilities hold transformative potential for complex environmental exploration and confined-space applications. However, conventional integrated sensing methods force a trade-off between mechanical compliance and precise locomotion monitoring, making wireless, real-time, and high-fidelity locomotion sensing challenging. Here, we present an integrated strategy combining programmable magnetic actuation, laser-sintered flexible strain sensors, and wireless signal transmission to achieve precise, untethered deformation monitoring. Template-assisted magnetization is used to generate spatially resolved magnetic domains, while energy-modulated laser sintering directly fabricates strain sensors on elastomeric substrates. The results show that high-power laser sintering (30 W at 10 mm/s) produces porous silver architectures optimal for strain sensing, with high linearity (±3.2% error) and robust cyclic stability (resistance drift <3.7%). Validation on a tripodal crawling robot reveals that a miniaturized 433 MHz wireless system enables real-time deformation monitoring with a latency of 120 ± 15 μs. This innovative wireless sensing integration opens a paradigm for closed-loop control and adaptive behavior in dynamically deforming soft robots, establishing a scalable framework for embodied intelligence in next-generation robotic systems.
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


