基于mof的甘油三酯降解磁操纵微轮机器人
IF 17.5
1区 材料科学
Q1 MATERIALS SCIENCE, MULTIDISCIPLINARY
引用次数: 0
摘要
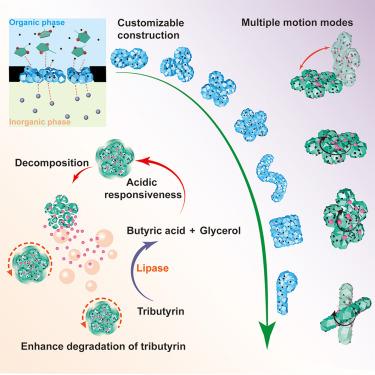
微/纳米机器人(MNRs)由于其非侵入性操作、高可控性和出色的渗透能力,在生物医学领域显示出巨大的潜力,特别是磁控纳米机器人。金属有机框架(MOFs)由于其高负载能力和响应能力而成为微型机器人设计的理想选择。但是创建可定制的基于mof的微型机器人带来了挑战。本研究提出了一种结合微纳米加工和双相界面结晶的新方法来构建可定制的基于mof的磁控微轮机器人(MMWRs)。通过原位加入磁性纳米颗粒,这些MMWRs表现出优异的磁响应性,在可调节的磁场下执行各种运动,如站立、躺卧、旋转、翻滚和滚动,从而实现精确控制和复杂任务的执行。此外,装载脂肪酶的MMWRs通过运动诱导的扩散和ph响应反馈机制有效地降解了三丁酸甘油酯,从而提高了脂肪酶的释放和降解效率。正电子发射断层扫描与计算机断层扫描成像证实了MMWRs在模拟管道场景中的潜力。可定制的基于mof的微型机器人为环境退化和疾病治疗的进步铺平了道路。本文章由计算机程序翻译,如有差异,请以英文原文为准。

MOF-based magnetically manipulated microwheel-robots for triglyceride degradation
Micro/nanorobots (MNRs) have demonstrated immense potential in the biomedical field, particularly magnetic-controlled MNRs, due to their non-invasive operation, high controllability, and excellent penetration abilities. Metal-organic frameworks (MOFs) are ideal for micro-robot design due to their high payload capacity and responsiveness. But creating customizable MOF-based micro-robots presents challenges. This study presents a novel method combining micro/nanofabrication and biphasic interfacial crystallization to construct customizable MOF-based magnetically manipulated microwheel-robots (MMWRs). By incorporating magnetic nanoparticles in situ, these MMWRs exhibit excellent magnetic responsiveness, performing various motions—such as standing, lying, rotating, tumbling, and rolling—under adjustable magnetic fields, enabling precise control and complex task execution. Furthermore, lipase-loaded MMWRs efficiently degrade tributyrin, with motion-induced diffusion and a pH-responsive feedback mechanism enhancing lipase release and degradation efficiency. Positron emission tomography with computed tomography imaging confirmed the potential of MMWRs in a simulated pipeline scenario. The customizable MOF-based micro-robots pave the way for advancements in environmental degradation and disease treatment.
求助全文
通过发布文献求助,成功后即可免费获取论文全文。
去求助
来源期刊
Matter
MATERIALS SCIENCE, MULTIDISCIPLINARY-
CiteScore
26.30
自引率
2.60%
发文量
367
期刊介绍:
Matter, a monthly journal affiliated with Cell, spans the broad field of materials science from nano to macro levels,covering fundamentals to applications. Embracing groundbreaking technologies,it includes full-length research articles,reviews, perspectives,previews, opinions, personnel stories, and general editorial content.
Matter aims to be the primary resource for researchers in academia and industry, inspiring the next generation of materials scientists.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


