Arran T Reader, Laura Gaile, Wenxi Li, Emily E Cheah Mc Corry, Kirsten Mackie
{"title":"多目标处理:探索单手累积抓取和运输策略。","authors":"Arran T Reader, Laura Gaile, Wenxi Li, Emily E Cheah Mc Corry, Kirsten Mackie","doi":"10.1007/s00221-025-07084-x","DOIUrl":null,"url":null,"abstract":"<p><p>Humans can cumulatively grasp multiple objects and then transport them using a single hand (e.g., when clearing up tableware). This skill, which we refer to as 'multiple object handling', helps minimise the number of actions required to transport objects. However, it also presents unique challenges for the sensorimotor system, including the use of grips other than finger-thumb opposition (almost always used for grasping single objects). In the present work we explored the strategies used for multiple object handling, particularly focussing on object selection and grip choice. Participants were presented with pairs of objects, asked to grasp one of them and then, without placing that object down, grasp the second object and transport both to a designated location. We examined the order in which participants selected objects and the grips used for grasping and holding them. Results provide preliminary evidence for a typical approach to multiple object handling. We observed that when two objects were grasped cumulatively for transport, finger-thumb opposition was almost always used to grasp the first object, which was then frequently held using an atypical grip (e.g., finger-finger or finger-palm opposition). Finger-thumb opposition was almost always used once again to grasp the subsequent object. Participants preferred to grasp objects with lower mass or surface area first, potentially facilitating this approach. In sum, this work provides insight into a technique commonly used for efficient object transport.</p>","PeriodicalId":12268,"journal":{"name":"Experimental Brain Research","volume":"243 7","pages":"165"},"PeriodicalIF":1.6000,"publicationDate":"2025-06-03","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12134043/pdf/","citationCount":"0","resultStr":"{\"title\":\"Multiple object handling: exploring strategies for cumulative grasping and transport using a single hand.\",\"authors\":\"Arran T Reader, Laura Gaile, Wenxi Li, Emily E Cheah Mc Corry, Kirsten Mackie\",\"doi\":\"10.1007/s00221-025-07084-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>Humans can cumulatively grasp multiple objects and then transport them using a single hand (e.g., when clearing up tableware). This skill, which we refer to as 'multiple object handling', helps minimise the number of actions required to transport objects. However, it also presents unique challenges for the sensorimotor system, including the use of grips other than finger-thumb opposition (almost always used for grasping single objects). In the present work we explored the strategies used for multiple object handling, particularly focussing on object selection and grip choice. Participants were presented with pairs of objects, asked to grasp one of them and then, without placing that object down, grasp the second object and transport both to a designated location. We examined the order in which participants selected objects and the grips used for grasping and holding them. Results provide preliminary evidence for a typical approach to multiple object handling. We observed that when two objects were grasped cumulatively for transport, finger-thumb opposition was almost always used to grasp the first object, which was then frequently held using an atypical grip (e.g., finger-finger or finger-palm opposition). Finger-thumb opposition was almost always used once again to grasp the subsequent object. Participants preferred to grasp objects with lower mass or surface area first, potentially facilitating this approach. In sum, this work provides insight into a technique commonly used for efficient object transport.</p>\",\"PeriodicalId\":12268,\"journal\":{\"name\":\"Experimental Brain Research\",\"volume\":\"243 7\",\"pages\":\"165\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2025-06-03\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12134043/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Experimental Brain Research\",\"FirstCategoryId\":\"3\",\"ListUrlMain\":\"https://doi.org/10.1007/s00221-025-07084-x\",\"RegionNum\":4,\"RegionCategory\":\"医学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"NEUROSCIENCES\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Experimental Brain Research","FirstCategoryId":"3","ListUrlMain":"https://doi.org/10.1007/s00221-025-07084-x","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"NEUROSCIENCES","Score":null,"Total":0}
Multiple object handling: exploring strategies for cumulative grasping and transport using a single hand.
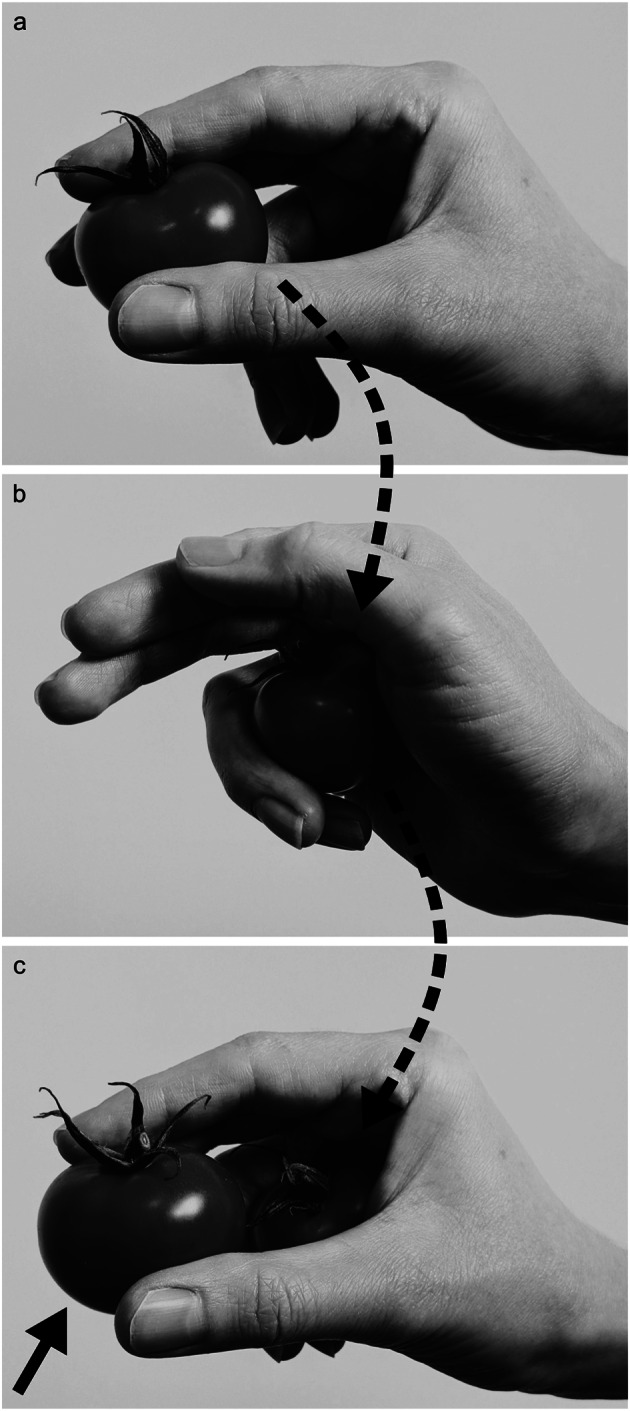
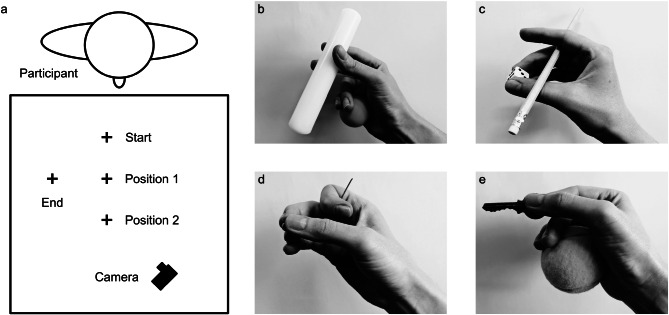
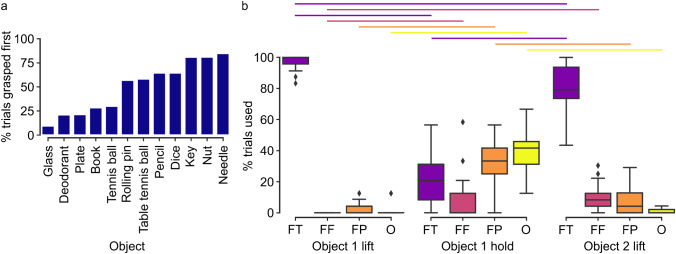
Humans can cumulatively grasp multiple objects and then transport them using a single hand (e.g., when clearing up tableware). This skill, which we refer to as 'multiple object handling', helps minimise the number of actions required to transport objects. However, it also presents unique challenges for the sensorimotor system, including the use of grips other than finger-thumb opposition (almost always used for grasping single objects). In the present work we explored the strategies used for multiple object handling, particularly focussing on object selection and grip choice. Participants were presented with pairs of objects, asked to grasp one of them and then, without placing that object down, grasp the second object and transport both to a designated location. We examined the order in which participants selected objects and the grips used for grasping and holding them. Results provide preliminary evidence for a typical approach to multiple object handling. We observed that when two objects were grasped cumulatively for transport, finger-thumb opposition was almost always used to grasp the first object, which was then frequently held using an atypical grip (e.g., finger-finger or finger-palm opposition). Finger-thumb opposition was almost always used once again to grasp the subsequent object. Participants preferred to grasp objects with lower mass or surface area first, potentially facilitating this approach. In sum, this work provides insight into a technique commonly used for efficient object transport.
期刊介绍:
Founded in 1966, Experimental Brain Research publishes original contributions on many aspects of experimental research of the central and peripheral nervous system. The focus is on molecular, physiology, behavior, neurochemistry, developmental, cellular and molecular neurobiology, and experimental pathology relevant to general problems of cerebral function. The journal publishes original papers, reviews, and mini-reviews.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


