Yang Chen, Yuxiang Liu, Runze Yu, Yingshuai Zhao, Juntong Lu, Gang Chen, Yijun Zheng and Chunhong Ye*,
{"title":"液晶弹性体致动器的动态切换3D形状变形和旋转","authors":"Yang Chen, Yuxiang Liu, Runze Yu, Yingshuai Zhao, Juntong Lu, Gang Chen, Yijun Zheng and Chunhong Ye*, ","doi":"10.1021/acsami.5c0897910.1021/acsami.5c08979","DOIUrl":null,"url":null,"abstract":"<p >Polymer-based soft actuators capable of responsive shape morphing hold great potential for developing untethered soft robotics with dexterous motion under complex surroundings. To realize this potential, achieving fast, dynamically tunable shape morphing that can generate sufficient mechanical force is essential. Here, soft actuators composed of liquid crystal elastomer (LCE) bilayer film are constructed via direct ink writing (DIW), which exhibit rapid and sequential 3D-to-3D́ morphological reconfiguration within seconds under temperature stimulus. The dynamic shape morphing is facilitated by the bidirectional bending of the LCE film, which possesses anisotropic mesogen orientation and distinct phase transition temperatures. By balancing the two LCE layers in terms of differential contraction, layer sequence, and two-dimensional (2D) geometry, its bending directions, amplitude, and sequence can be programmed, thus enabling diverse three-dimensional (3D) shape reconfigurations, such as biomimetic “orchid” blooming and “palm” gesture switching. Beyond shape morphing, the LCE actuator is capable of converting shape morphing into rotational kinetic energy in different directions. As a prototype, it generates sufficient torque to drive the rotation of an LCE rotor, exhibiting switchable clockwise, “self-oscillating”, and anticlockwise motions. With the merits of dynamic shape morphing and mechanical energy harvesting, the LCE actuator presents a promising platform for advancing soft robotics with adaptive and diverse locomotion for performing tasks in complex environments.</p>","PeriodicalId":5,"journal":{"name":"ACS Applied Materials & Interfaces","volume":"17 22","pages":"33244–33256 33244–33256"},"PeriodicalIF":8.2000,"publicationDate":"2025-05-26","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Dynamically Switchable 3D Shape-Morphing and Rotation from Liquid Crystal Elastomer Actuators\",\"authors\":\"Yang Chen, Yuxiang Liu, Runze Yu, Yingshuai Zhao, Juntong Lu, Gang Chen, Yijun Zheng and Chunhong Ye*, \",\"doi\":\"10.1021/acsami.5c0897910.1021/acsami.5c08979\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p >Polymer-based soft actuators capable of responsive shape morphing hold great potential for developing untethered soft robotics with dexterous motion under complex surroundings. To realize this potential, achieving fast, dynamically tunable shape morphing that can generate sufficient mechanical force is essential. Here, soft actuators composed of liquid crystal elastomer (LCE) bilayer film are constructed via direct ink writing (DIW), which exhibit rapid and sequential 3D-to-3D́ morphological reconfiguration within seconds under temperature stimulus. The dynamic shape morphing is facilitated by the bidirectional bending of the LCE film, which possesses anisotropic mesogen orientation and distinct phase transition temperatures. By balancing the two LCE layers in terms of differential contraction, layer sequence, and two-dimensional (2D) geometry, its bending directions, amplitude, and sequence can be programmed, thus enabling diverse three-dimensional (3D) shape reconfigurations, such as biomimetic “orchid” blooming and “palm” gesture switching. Beyond shape morphing, the LCE actuator is capable of converting shape morphing into rotational kinetic energy in different directions. As a prototype, it generates sufficient torque to drive the rotation of an LCE rotor, exhibiting switchable clockwise, “self-oscillating”, and anticlockwise motions. With the merits of dynamic shape morphing and mechanical energy harvesting, the LCE actuator presents a promising platform for advancing soft robotics with adaptive and diverse locomotion for performing tasks in complex environments.</p>\",\"PeriodicalId\":5,\"journal\":{\"name\":\"ACS Applied Materials & Interfaces\",\"volume\":\"17 22\",\"pages\":\"33244–33256 33244–33256\"},\"PeriodicalIF\":8.2000,\"publicationDate\":\"2025-05-26\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"ACS Applied Materials & Interfaces\",\"FirstCategoryId\":\"88\",\"ListUrlMain\":\"https://pubs.acs.org/doi/10.1021/acsami.5c08979\",\"RegionNum\":2,\"RegionCategory\":\"材料科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"MATERIALS SCIENCE, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"ACS Applied Materials & Interfaces","FirstCategoryId":"88","ListUrlMain":"https://pubs.acs.org/doi/10.1021/acsami.5c08979","RegionNum":2,"RegionCategory":"材料科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
Dynamically Switchable 3D Shape-Morphing and Rotation from Liquid Crystal Elastomer Actuators
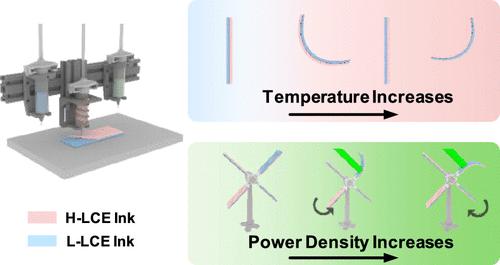
Polymer-based soft actuators capable of responsive shape morphing hold great potential for developing untethered soft robotics with dexterous motion under complex surroundings. To realize this potential, achieving fast, dynamically tunable shape morphing that can generate sufficient mechanical force is essential. Here, soft actuators composed of liquid crystal elastomer (LCE) bilayer film are constructed via direct ink writing (DIW), which exhibit rapid and sequential 3D-to-3D́ morphological reconfiguration within seconds under temperature stimulus. The dynamic shape morphing is facilitated by the bidirectional bending of the LCE film, which possesses anisotropic mesogen orientation and distinct phase transition temperatures. By balancing the two LCE layers in terms of differential contraction, layer sequence, and two-dimensional (2D) geometry, its bending directions, amplitude, and sequence can be programmed, thus enabling diverse three-dimensional (3D) shape reconfigurations, such as biomimetic “orchid” blooming and “palm” gesture switching. Beyond shape morphing, the LCE actuator is capable of converting shape morphing into rotational kinetic energy in different directions. As a prototype, it generates sufficient torque to drive the rotation of an LCE rotor, exhibiting switchable clockwise, “self-oscillating”, and anticlockwise motions. With the merits of dynamic shape morphing and mechanical energy harvesting, the LCE actuator presents a promising platform for advancing soft robotics with adaptive and diverse locomotion for performing tasks in complex environments.
期刊介绍:
ACS Applied Materials & Interfaces is a leading interdisciplinary journal that brings together chemists, engineers, physicists, and biologists to explore the development and utilization of newly-discovered materials and interfacial processes for specific applications. Our journal has experienced remarkable growth since its establishment in 2009, both in terms of the number of articles published and the impact of the research showcased. We are proud to foster a truly global community, with the majority of published articles originating from outside the United States, reflecting the rapid growth of applied research worldwide.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


