Yongqi Zhu, Juan Li, Jianbin Huang, Weida Li, Gai Liu, Lining Sun
{"title":"一种基于粘滑驱动原理的定位指向机构的分析与实验。","authors":"Yongqi Zhu, Juan Li, Jianbin Huang, Weida Li, Gai Liu, Lining Sun","doi":"10.3389/fnbot.2025.1567291","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Traditional positioning and pointing mechanisms often face limitations in simultaneously achieving high speed and high resolution, and their travel range is typically constrained. To overcome these challenges, we propose a novel positioning and pointing mechanism driven by piezoelectric ceramics in this study. This mechanism is capable of achieving both high speed and high resolution by using two driving principles: resonance and stick-slip. This paper will focus on analyzing the stick-slip driving principle.</p><p><strong>Methods: </strong>We propose a configuration of the drive module within the positioning and pointing mechanism. By applying a low-frequency sawtooth wave excitation to the piezoelectric ceramics, the mechanism achieves high resolution based on the stick-slip driving principle. First, a simplified dynamic model of the drive module is established. The motion process of the drive module in stick-slip driving is divided into the stick phase and slip phase. With static and transient dynamic analyses conducted for each phase, the relationship between the output shaft angle, resolution, and driving voltage is derived. It is observed that during the stick phase, the output shaft angle and the driving voltage exhibit an approximately linear relationship, while in the slip phase, the output shaft angle and the driving voltage display nonlinearity due to impact forces and vibrations. Finally, a prototype of the positioning and pointing mechanism is designed, and an experimental platform is constructed to test the resolution of the prototype.</p><p><strong>Results: </strong>We construct a prototype of a dual-axis positioning and pointing mechanism composed of multiple drive modules and conduct resolution tests using two control methods: synchronous control and independent control. When synchronous control is used, the output shaft achieves a resolution of 0.38<i>μrad</i>, while with independent control, the resolution of the output shaft reaches 0.0276<i>μrad</i>.</p><p><strong>Discussion: </strong>The research results show that the positioning and pointing mechanism proposed in this study achieves high resolution through stick-slip driving principle, offering a novel approach for the advancement of such mechanisms.</p>","PeriodicalId":12628,"journal":{"name":"Frontiers in Neurorobotics","volume":"19 ","pages":"1567291"},"PeriodicalIF":2.8000,"publicationDate":"2025-05-15","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12119557/pdf/","citationCount":"0","resultStr":"{\"title\":\"Analysis and experiment of a positioning and pointing mechanism based on the stick-slip driving principle.\",\"authors\":\"Yongqi Zhu, Juan Li, Jianbin Huang, Weida Li, Gai Liu, Lining Sun\",\"doi\":\"10.3389/fnbot.2025.1567291\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Introduction: </strong>Traditional positioning and pointing mechanisms often face limitations in simultaneously achieving high speed and high resolution, and their travel range is typically constrained. To overcome these challenges, we propose a novel positioning and pointing mechanism driven by piezoelectric ceramics in this study. This mechanism is capable of achieving both high speed and high resolution by using two driving principles: resonance and stick-slip. This paper will focus on analyzing the stick-slip driving principle.</p><p><strong>Methods: </strong>We propose a configuration of the drive module within the positioning and pointing mechanism. By applying a low-frequency sawtooth wave excitation to the piezoelectric ceramics, the mechanism achieves high resolution based on the stick-slip driving principle. First, a simplified dynamic model of the drive module is established. The motion process of the drive module in stick-slip driving is divided into the stick phase and slip phase. With static and transient dynamic analyses conducted for each phase, the relationship between the output shaft angle, resolution, and driving voltage is derived. It is observed that during the stick phase, the output shaft angle and the driving voltage exhibit an approximately linear relationship, while in the slip phase, the output shaft angle and the driving voltage display nonlinearity due to impact forces and vibrations. Finally, a prototype of the positioning and pointing mechanism is designed, and an experimental platform is constructed to test the resolution of the prototype.</p><p><strong>Results: </strong>We construct a prototype of a dual-axis positioning and pointing mechanism composed of multiple drive modules and conduct resolution tests using two control methods: synchronous control and independent control. When synchronous control is used, the output shaft achieves a resolution of 0.38<i>μrad</i>, while with independent control, the resolution of the output shaft reaches 0.0276<i>μrad</i>.</p><p><strong>Discussion: </strong>The research results show that the positioning and pointing mechanism proposed in this study achieves high resolution through stick-slip driving principle, offering a novel approach for the advancement of such mechanisms.</p>\",\"PeriodicalId\":12628,\"journal\":{\"name\":\"Frontiers in Neurorobotics\",\"volume\":\"19 \",\"pages\":\"1567291\"},\"PeriodicalIF\":2.8000,\"publicationDate\":\"2025-05-15\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12119557/pdf/\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Frontiers in Neurorobotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.3389/fnbot.2025.1567291\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"2025/1/1 0:00:00\",\"PubModel\":\"eCollection\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Neurorobotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.3389/fnbot.2025.1567291","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q3","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Analysis and experiment of a positioning and pointing mechanism based on the stick-slip driving principle.
Introduction: Traditional positioning and pointing mechanisms often face limitations in simultaneously achieving high speed and high resolution, and their travel range is typically constrained. To overcome these challenges, we propose a novel positioning and pointing mechanism driven by piezoelectric ceramics in this study. This mechanism is capable of achieving both high speed and high resolution by using two driving principles: resonance and stick-slip. This paper will focus on analyzing the stick-slip driving principle.
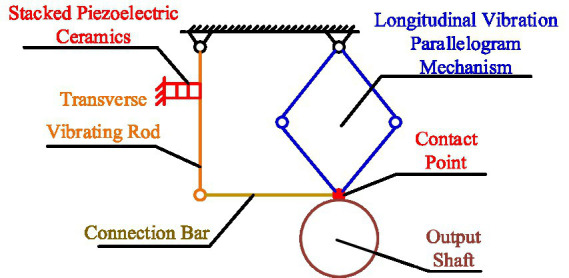
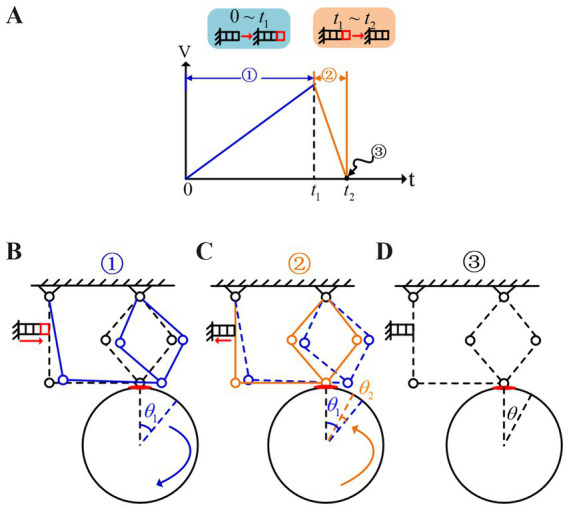
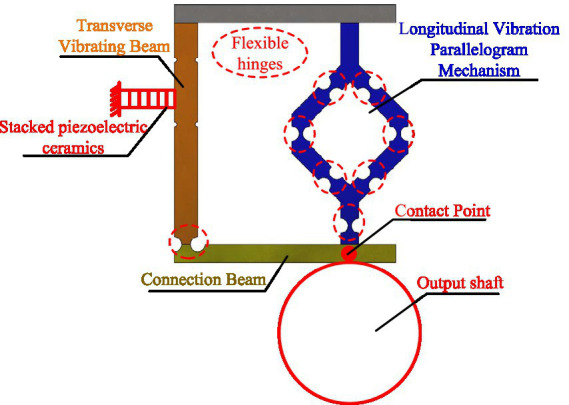
Methods: We propose a configuration of the drive module within the positioning and pointing mechanism. By applying a low-frequency sawtooth wave excitation to the piezoelectric ceramics, the mechanism achieves high resolution based on the stick-slip driving principle. First, a simplified dynamic model of the drive module is established. The motion process of the drive module in stick-slip driving is divided into the stick phase and slip phase. With static and transient dynamic analyses conducted for each phase, the relationship between the output shaft angle, resolution, and driving voltage is derived. It is observed that during the stick phase, the output shaft angle and the driving voltage exhibit an approximately linear relationship, while in the slip phase, the output shaft angle and the driving voltage display nonlinearity due to impact forces and vibrations. Finally, a prototype of the positioning and pointing mechanism is designed, and an experimental platform is constructed to test the resolution of the prototype.
Results: We construct a prototype of a dual-axis positioning and pointing mechanism composed of multiple drive modules and conduct resolution tests using two control methods: synchronous control and independent control. When synchronous control is used, the output shaft achieves a resolution of 0.38μrad, while with independent control, the resolution of the output shaft reaches 0.0276μrad.
Discussion: The research results show that the positioning and pointing mechanism proposed in this study achieves high resolution through stick-slip driving principle, offering a novel approach for the advancement of such mechanisms.
期刊介绍:
Frontiers in Neurorobotics publishes rigorously peer-reviewed research in the science and technology of embodied autonomous neural systems. Specialty Chief Editors Alois C. Knoll and Florian Röhrbein at the Technische Universität München are supported by an outstanding Editorial Board of international experts. This multidisciplinary open-access journal is at the forefront of disseminating and communicating scientific knowledge and impactful discoveries to researchers, academics and the public worldwide.
Neural systems include brain-inspired algorithms (e.g. connectionist networks), computational models of biological neural networks (e.g. artificial spiking neural nets, large-scale simulations of neural microcircuits) and actual biological systems (e.g. in vivo and in vitro neural nets). The focus of the journal is the embodiment of such neural systems in artificial software and hardware devices, machines, robots or any other form of physical actuation. This also includes prosthetic devices, brain machine interfaces, wearable systems, micro-machines, furniture, home appliances, as well as systems for managing micro and macro infrastructures. Frontiers in Neurorobotics also aims to publish radically new tools and methods to study plasticity and development of autonomous self-learning systems that are capable of acquiring knowledge in an open-ended manner. Models complemented with experimental studies revealing self-organizing principles of embodied neural systems are welcome. Our journal also publishes on the micro and macro engineering and mechatronics of robotic devices driven by neural systems, as well as studies on the impact that such systems will have on our daily life.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


